ROS2 框架下运行 Python ROS2 支持 Python 语言,本文记录 Python 创建 ROS2 节点的流程以及运行方式。 2024-07-11 Tools > ROS2 #Tools #ROS2
ROS2 ROS2(Robot Operating System 2)是一个用于机器人软件开发的开源工具套件,由非营利组织Open Source Robotics Foundation(OSRF)维护。它是ROS(Robot Operating System,机器人操作系统)的第二个主要版本,旨在提供更好的性能、更易于使用的API和更现代的软件架构。本文记录相关内容。 2024-07-10 Tools > ROS2 #Tools #ROS2
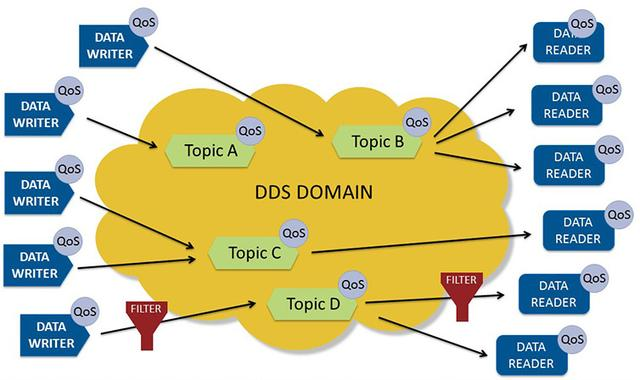
DDS 通信协议 DDS(Data Distribution Service)是一套通信协议和 API 标准;它提供了以数据为中心的连接服务,基于发布者-订阅者模型。本文记录相关内容。 2024-07-10 Protocol #Protocol
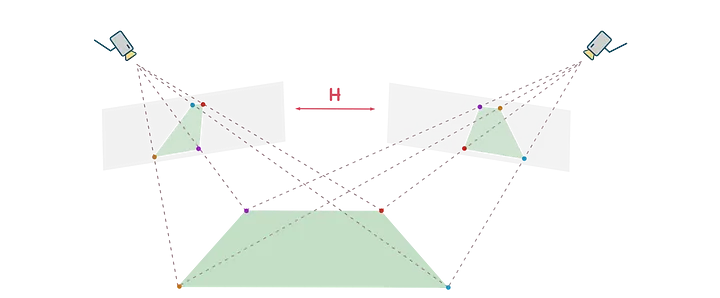
OpenCV 单应性矩阵计算函数 findHomography 在计算机视觉领域,单应性是一个非常重要的概念,本文记录单应性矩阵的概念以及 OpenCV 计算函数。 2024-07-09 Image_Processing > OpenCV #OpenCV #Image_Processing
BF、FLANN 特征匹配原理与 OpenCV 实现 在使用特征提取算法提取了描述子后,需要对不同图像之间的特征进行匹配,本文记录 FLANN 以及相关内容。 2024-07-09 Image_Processing > Feature_Match #Image_Processing #Feature_Match
ORB 特征 ORB 是 Oriented Fast and Rotated Brief 的简称,可以用来对图像中的关键点快速创建特征向量,本文记录相关内容。 2024-07-08 Image_Processing > Feature_Extraction #Image_Processing #Feature_Extraction
FAST 角点检测 FAST,全称Features From Accelerated Segment Test,是一种快速的角点检测算法,本文记录相关内容。 2024-07-08 Image_Processing > Feature_Extraction #Image_Processing #Feature_Extraction
OpenCV 关于版本的一些说明 近期接触了 OpenCV 的多种版本,本文记录搜集到的信息。 2024-07-08 Image_Processing > OpenCV #OpenCV #Image_Processing
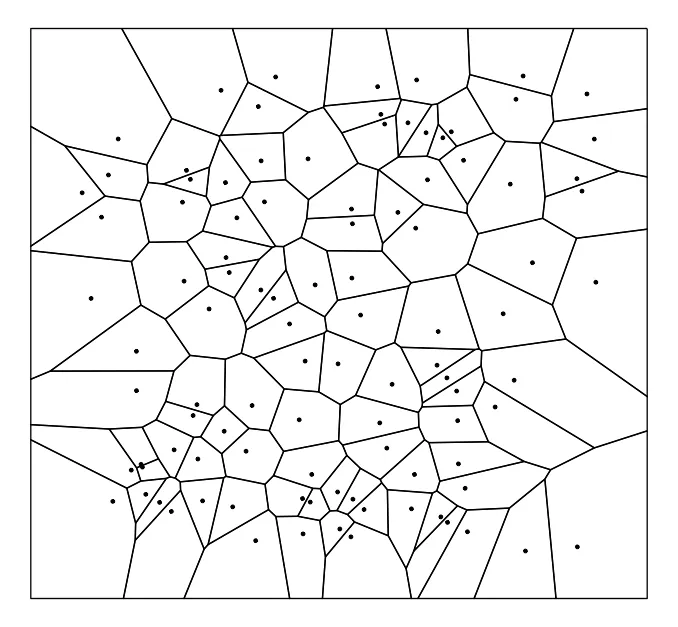
Voronoi 图 Voronoi Diagram 是一种常出现在大自然之中的图案,也被广泛应用在我们的生活中,本文记录相关内容。 2024-07-04 Image_Processing #Image_Processing
SURF 特征 SURF,英文的全称为 Speed Up Robust Features,直译为:加速版的具有鲁棒特性的特征算法,是由Bay在2006年首次提出的,本文记录相关内容。 2024-07-04 Image_Processing > Feature_Extraction #Image_Processing #Feature_Extraction