本文最后更新于:2024年5月7日 下午
我们将处理视野中出现多个物体的情况:并且,我们还要开发一些更成熟的方法,用于从二值图中恢复信息。
概述
图像处理时,视野中经常会出现多个物体,对于图像中的各个区域,我们必须将它们以某种方式标注出来,然后,分别计算:各个区域的面积、一阶矩和二阶矩。
标注图像中的物体

特征函数
特征函数又被称为示性函数,即:给图像中的不同区域赋予不同的数值,数学上,特征函数可以被表示为:如果$ x \in \Omega_{i} $ ,那么,$I(x)=i$,其中$ \Omega_{i} $表示:图像中的第$i$个区域。
连通区域
如果我们可以找到:连接二值图中的两个点的一条路径,并且,在这条路径上,特征函数的取值是常数,那么,我们认为:这两个点是连通的。因此,在图中点A与点B是连通的,但是,它们都不与点C相连通。二值图中的连通区域是一个:关于连通点的最大的集合,也就是说,
-
对于这个集合中的任意两点,都可以找到一条路径将它们连接起来;
-
所有的连通点都包含在这个集合之中。
在图中,除了背景以外,总共有4个连通区域和4个洞。
标注
在离散二值图中,一种对“物体”进行标注的方法是:选取一个 $b_{ij}=1$ 的点,并且,赋予这个点以及和它连接在一起的点一个标记;下一步,对所有与这些标记点相邻的点(除了那些已经被标注的点以外)进行标注;然后,不断地重复下去。当这个递归过程完成以后,这个图像区域就被标注完毕了。紧接着,我们可以继续选择一个新的起始点,然后,对下一个图像区域进行标注。为了能够找到一个新的未标记区域,我们可以使用一种“对称”的方式,来对图像进行简单扫描。一旦发现:没有被标注的、并且 $b_{ij}=1$ 的点,我们就以该点作为新的起始点,然后,(对图像区域)进行标注。如果在对所有图像单元(即:像素点)进行扫描以后,还没有发现这样的点,那么,我们就完成了对二值图像中所有“物体”的标注。
连通性
首先,我们必须认真考虑:术语近邻点(具体)意思。假设我们使用正方形作为基本单元来对图像进行剖分,那么,在这种情况下,我们可以粗略地将近邻点“认为是”:和给定图像单元(即:像素点)的四条边相连接的四个图像单元。但是,我们应该如何看待:和给定像素点的四个角相连的四个像素点呢?因此,对近邻点的定义存在两种可能的情况,也就是说:
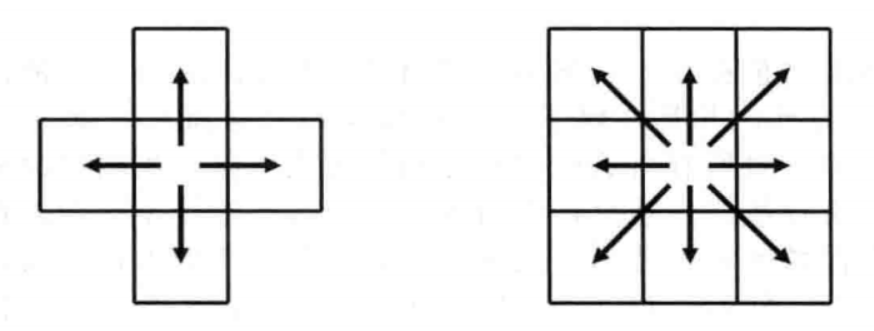
- 4一连接:只有和给定图像单元(即:像素点)的(4条)边相连的(4个)像素点,才被认为是(给定像素点)的近邻点。
- 8一连接:和给定图像单元的(4个)角相连的(4个)像素点,也被认为是(给定像素点)的近邻点。
事实上,这两种定义方式都不能完全令人满意。要看出这一点,我们需要明确的一点是:从背景中,我们也可以“分割出”一个连通区域。我们希望:对于离散二值图,我们从连续二值图中得出的、关于连通区域的直观感觉仍然适用。
我们可以用一条简单(不打结)的闭合曲线,将图像分割为两个简单的连通区域。这个结论被称为Jordan曲线定理。
现在,让我们来考虑一个包含4个值为1的像素点的简单图像。图中每一个值为1的像素点和中心像素点的边相连;而中心像素点的值为0,即:

对于这种二值图,这是一个通过:去除“十字形”的中心点,从而形成的图形。如果我们选择使用4一连接,那么,我们会得到四个彼此不相连的物体区域。
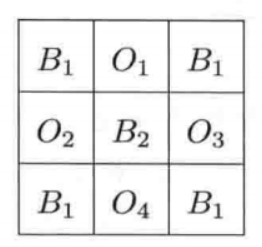
这四个彼此不相连的物体,肯定无法形成一条闭合曲线。然而,采用4一连接的方法,中间的那个作为背景的像素点($B_2$),并不和其他的背景像素点($B_1$)相连,这与我们的直观感觉是相符的。因此,采样 4连接 的方法,我们得到了两个背景区域,但是,没有得到一条闭合曲线!
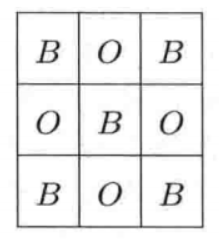
相反的,如果我们选择使用8一连接的方法,那么,图中的这4个(值为1的)像素点确实形成了一条闭合曲线,但是,中间的那个作为背景的像素点,却和其他四个背景像素点连接在了一起。我们得到了一条闭合曲线,但是,所得到的背景区域却只有一个,即:
解决这个悖论的一种方法是:对于物体使用4一连接,但是,对于背景使用8一连接(或者反过来)。这种对于物体和背景处理上的“不对称”,可能是我们所不希望看到的。我们可以通过:引入另外一种“不对称”,来避免:这种对物体和背景处理上的“不对称”。
- 和给定像素点的4条边相连的四个像素点
- 和给定像素点的4个角相连的4个像素点中的两个,定义为某一给定像素点的近邻点,即:
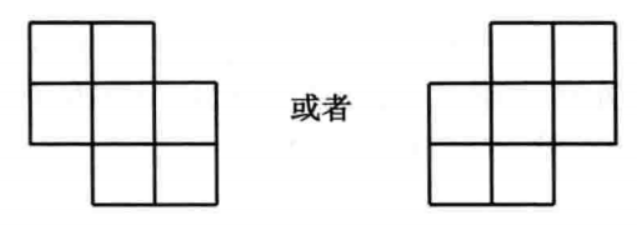
这两个和给定像素点的角相连的像素点,必须在同一条对角线上。这样做是为了保证像素点之间相互关系的对称,也就是说,如果像素点A是像素点B的近邻点,那么,像素点区域B也是像素点A的近邻点。从现在开始,我们将使用:上面所介绍的关于近邻点的两种定义方式中的第一个(即上图中的第一个),来确定像素点之间的连接关系。也就是说,我们将:给定像素点的上方、右方、右下方、下方、左方、左上方等6个方向上的、与该给定像素点相邻的6个像素点,定义为该给定像素点的近邻点。这种连接方式被称为 6一连接。
对于物体和背景,我们都使用6一连接的定义方式,就不会产生:使用4一连接和8一连接时所产生的、和连续二值图(的直观感觉)不一致的情况。如果我们使用正方形作为基本单元,来对图像进行剖分,那么,我们将使用这种6一连接的定义方式。
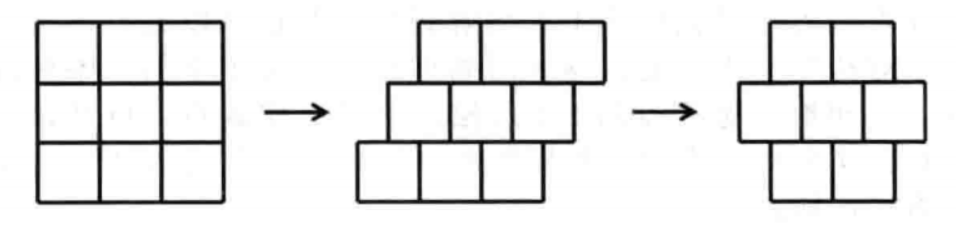
如果我们使用正六边形来对图像进行剖分,那么,问题就会变得简单得多。和某一个给定像素点相连的所有像素点,都是该给定像素点的近邻点,因此,不会出现“含混不清”的情况。我们上面的操作(即:关于6一连接的定义)可以被看作是:对正方形格栅进行简单扭曲,从而将其变为正六边形格栅的过程。为了看出这一点,我们将图像中某一特定行的上面一行像素点,整体向右移动半个像素宽度,然后,再将该特定行的下一行像素点,整体向左移动半个像素宽度,从而得到一个新的结构。现在,对于该特定行上的每一个像素点,其周围都正好有六个像素点与它相邻接,并且,这六个像素点正好是:上面所介绍的6一连接方式所确定的六个邻接点,如下图所示:
串行标注算法
现在,我们要介绍一种标注算法,这种标注算法更适于对图像进行串行扫描,并且,它不需要使用递归操作。我们约定:
- 对图像进行逐行扫描,并且,行的编号顺序是从上到下的;
- 对于每一行,我们按照从左到右的顺序,对该行中的像素点进行扫描。
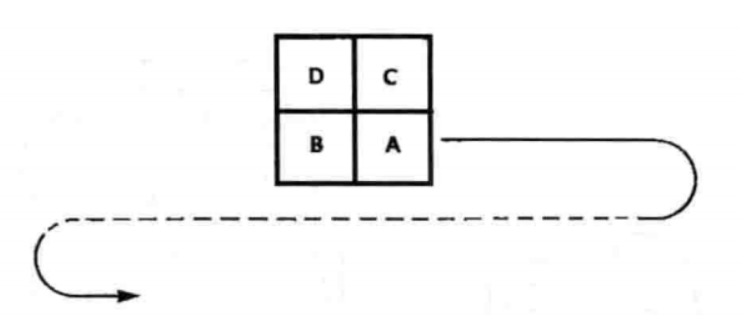
根据我们事先约定的扫描顺序,当我们扫描到某一个像素点A时,A点左边的像素点B已经被标注过了,并且,A点正上方的像素点C也被标注过了;此外,根据6一连接的定义,B点正上方的像素点D也是和A相连的,因此,我们还需要考虑D的标注结果。
为了简化问题,我们只对图像中的物体进行标注。如果A是0那么,我们不需要进行任何操作:如果A是1,并且,D点也被标注了(也就是说,D是(图像中的)物体上的点),那么,我们需要将D的标注结果(简称:标签)赋给A。类似的,如果点B或者点C也被标注了,那么,我们同样也需要将B或者C的标签复制给A.如果点B和C都没有被标注,并且,A是1,那么,我们必须选取一个新的标签,来对A进行标注。这表示:从A点开始,我们对一个新的物体进行标注。还有一种可能性是:B和C都被标注了。
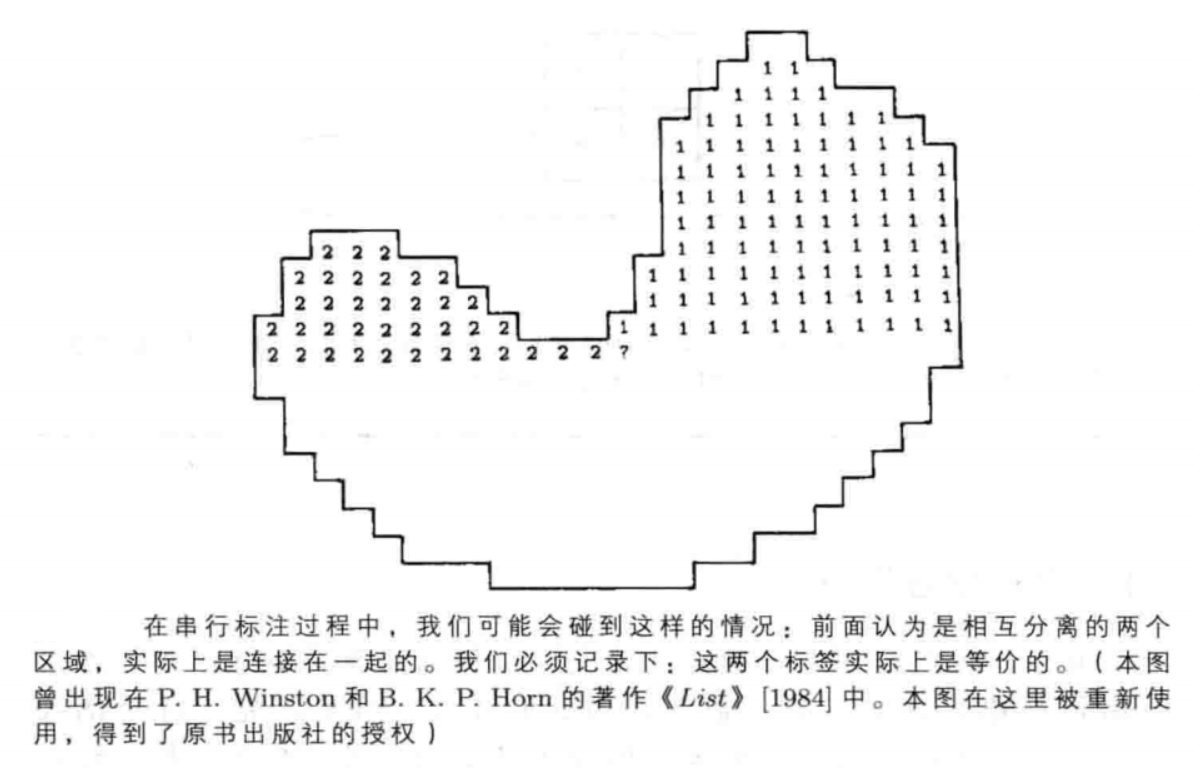
如果B和C的标签是相同的,那么,这并不会产生任何问题:但是,在我们关于6一连接的约定中,B和C是不相邻的,因此,B和C的标签有可能不同。对于这种情况,我们会将两个不同的标签赋予同一个物体。这意味着图像中的两个区域通过A点连接在了一起。此时,我们必须在A点做上新的“记号”,用来表示:A点上的这两个标签(即:B和C的标签)是等价的:然后,我们任意选取其中一个标签,来对A进行标注。对于串行标注算法,我们无法避开这个问题,这是串行标注算法必须付出的“代价”。
串行扫描结束后,我们需要将:图像中具有等价标签的各个区域,合并在一起。如果我们的目的是:计算区域的零阶矩、一阶矩以及二阶矩的总量,那么,我们甚至可以绕过区域合并这一步,而只需要简单地将:等价标签所对应的各个(等价)区域的零阶矩、一阶矩、二阶矩的计算结果,分别对应地加在一起即可。
如果我们想要让图像中的各个区域都具有唯一的标签,那么,我们需要对串行扫描结果进行二次扫描,从而将同一个具有代表性的标签赋予:具有等价标签的多个区域。我们可以从该区域所拥有的多个等价标签中,随机选取出的一个标签,来作为该等价区域的标签。
参考资料
- 伯特霍尔德・霍恩著 BERTHOLDKLAUSPAULHORN. 机器视觉[M]. 中国青年出版社, 2014.
文章链接:
https://www.zywvvd.com/notes/study/image-processing/robot-vision/chapter-4/multi-obj/multi-obj/
“觉得不错的话,给点打赏吧 ୧(๑•̀⌄•́๑)૭”

微信支付

支付宝支付