本文最后更新于:2025年4月30日 下午
KD-树(k-dimensional tree)是一种用于组织点在k维空间中的数据结构,主要用于各种搜索和优化任务,如最近邻搜索、范围搜索和k最近邻搜索。KD-树是二叉树的一种特殊形式,可以看作是二分搜索树(BST)的推广,但适用于多个维度。本文记录相关内容。
简介
kd树(k-dimensional树的简称),是一种分割k维数据空间的数据结构,其中的每一个节点都是k维的数据,主要应用于多维空间关键数据的近邻查找(Nearest Neighbor)和近似最近邻查找(Approximate Nearest Neighbor)。
其实KDTree就是二叉查找树(Binary Search Tree,BST)的变种。二叉查找树的性质如下:
- 若它的左子树不为空,则左子树上所有结点的值均小于它的根结点的值;
- 若它的右子树不为空,则右子树上所有结点的值均大于它的根结点的值;
- 它的左、右子树也分别为二叉排序树;
如果我们要处理的对象集合是一个K维空间中的数据集,我们首先需要确定是:怎样将一个K维数据划分到左子树或右子树?
在构造1维BST树类似,只不过对于Kd树,在当前节点的比较并不是通过对K维数据进行整体的比较,而是选择某一个维度d,然后比较两个K维数据在该维度 d上的大小关系,即每次选择一个维度d来对K维数据进行划分,相当于用一个垂直于该维度d的超平面将K维数据空间一分为二,平面一边的所有K维数据 在d维度上的值小于平面另一边的所有K维数据对应维度上的值。也就是说,我们每选择一个维度进行如上的划分,就会将K维数据空间划分为两个部分,如果我 们继续分别对这两个子K维空间进行如上的划分,又会得到新的子空间,对新的子空间又继续划分,重复以上过程直到每个子空间都不能再划分为止。以上就是构造 Kd-Tree的过程,上述过程中涉及到两个重要的问题:
- 每次对子空间的划分时,怎样确定在哪个维度上进行划分;
- 在某个维度上进行划分时,怎样确保建立的树尽量地平衡,树越平衡代表着分割得越平均,搜索的时间也就是越少。
1、在哪个维度上进行划分?
一种选取轴点的策略是 median of the most spread dimension pivoting strategy,统计样本在每个维度上的数据方差,挑选出对应方差最大值的那个维度。数据方差大说明沿该坐标轴方向上数据点分散的比较开。这个方向上,进行数据分割可以获得最好的平衡。
2、怎样确保建立的树尽量地平衡?
给定一个数组,怎样才能得到两个子数组,这两个数组包含的元素 个数差不多且其中一个子数组中的元素值都小于另一个子数组呢?方法很简单,找到数组中的中值(即中位数,median),然后将数组中所有元素与中值进行 比较,就可以得到上述两个子数组。同样,在维度d上进行划分时,划分点(pivot)就选择该维度d上所有数据的中值,这样得到的两个子集合数据个数就基本相同了。
构建 Kd-Tree
- 在K维数据集合中选择具有最大方差的维度k,然后在该维度上选择中值m为pivot对该数据集合进行划分,得到两个子集合;同时创建一个树结点node,用于存储;
- 对两个子集合重复(1)步骤的过程,直至所有子集合都不能再划分为止;
示例
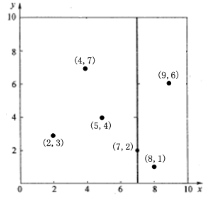
假设有 6 个二维数据点 ${(2,3),(5,4),(9,6),(4,7),(8,1),(7,2)}$,数据点位于二维空间内(如下图中黑点所示)。
kd树算法就是要确定图中这些分割空间的分割线(多维空间即为分割平面,一般为超平面)。下面就要通过一步步展示kd树是如何确定这些分割线的。
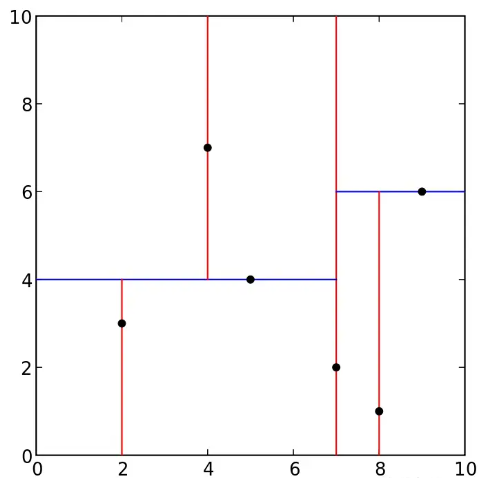
- 分别计算x,y方向上数据的方差,得知x方向上的方差最大;
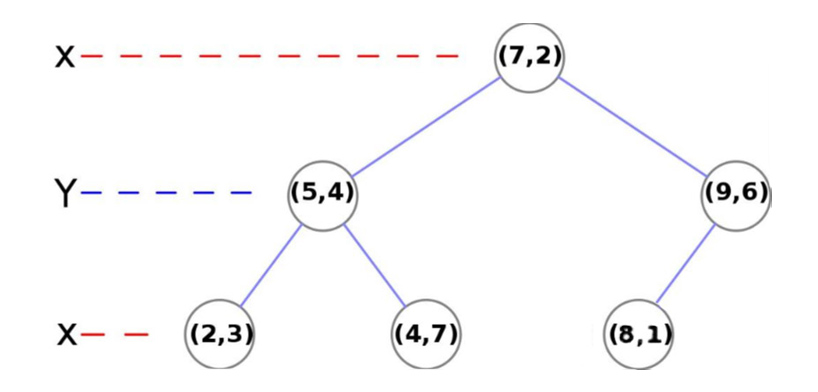
- 根据x轴方向的值2,5,9,4,8,7排序选出中值为7,所以该node中的data = (7,2)。这样,该节点的分割超平面就是通过(7,2)并垂直于x轴的直线x = 7;
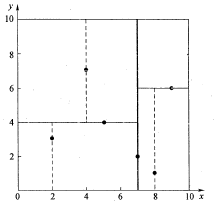
- 确定左子空间和右子空间。分割超平面x = 7将整个空间分为两部分,如下图所示。x < = 7的部分为左子空间,包含3个节点{(2,3),(5,4),(4,7)};另一部分为右子空间,包含2个节点{(9,6),(8,1)}。
-
更新分割轴:一共就两个维度,所以,下一个维度是y轴。
-
确定子节点:
左节点:在左支中找到y轴的中位数 (5,4),左支数据更新为{(2,3)},右支数据更新为{(4,7)}
右节点:在右支中找到y轴的中位数 (9,6),左支数据更新为{(8,1)},右支数据为null。
-
更新分割轴:下一个维度为x轴。
-
确定(5,4)的子节点:
左节点:由于只有一个数据,所以,左节点为 (2,3)
右节点:由于只有一个数据,所以,右节点为 (4,7)
-
确定 (9,6) 的子节点:
左节点:由于只有一个数据,所以,左节点为 (8,1)
右节点:右节点为空。
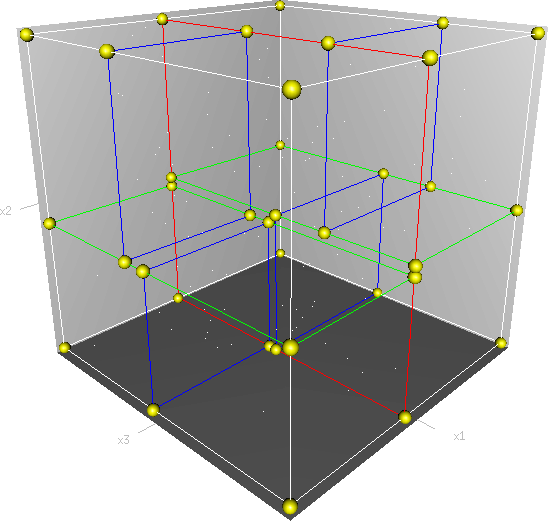
kd-tree表示:
Kd-Tree 最近邻查找
在构建了完整的kd-tree之后,我们想要使用他来进行高维空间的检索。
-
将查询数据Q从根结点开始,按照Q与各个结点的比较结果向下访问Kd-Tree,直至达到叶子结点。
其中Q与结点的比较指的是将Q对应于结点中的k维度上的值与中值m进行比较,若Q(k) < m,则访问左子树,否则访问右子树。达到叶子结点时,计算Q与叶子结点上保存的数据之间的距离,记录下最小距离对应的数据点,记为当前最近邻点nearest和最小距离dis。 -
进行回溯操作,该操作是为了找到离Q更近的“最近邻点”。即判断未被访问过的分支里是否还有离Q更近的点,它们之间的距离小于dis。
如果Q与其父结点下的未被访问过的分支之间的距离小于dis,则认为该分支中存在离P更近的数据,进入该结点,进行(1)步骤一样的查找过程,如果找到更近的数据点,则更新为当前的最近邻点nearest,并更新dis。
如果Q与其父结点下的未被访问过的分支之间的距离大于dis,则说明该分支内不存在与Q更近的点。
回溯的判断过程是从下往上进行的,直到回溯到根结点时已经不存在与P更近的分支为止。
注:判断未被访问过的树分支中是否还有离Q更近的点,就是判断"Q与未被访问的树分支的距离|Q(k) - m|“是否小于"Q到当前的最近邻点nearest的距离dis”。从几何空间上来看,就是判断以Q为中心,以dis为半径超球面是否与未被访问的树分支代表的超矩形相交。
下面举两个例子来演示一下最近邻查找的过程。
假设我们的kd树就是上面通过样本集{(2,3),(5,4),(9,6),(4,7),(8,1),(7,2)}创建的。
例一
查找 (2.1,3.1) 的最近邻。
如下图所示,红色的点即为要查找的点。通过二叉搜索,顺着搜索路径很快就能找到当前的最邻近点(2,3)。
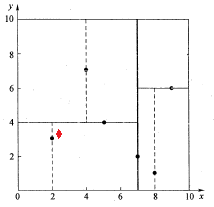
在上述搜索过程中,产生的搜索路径节点有<(7,2),(5,4),(2,3)>。为了找到真正的最近邻,还需要进行’回溯’操作,首先以(2,3)作为当前最近邻点nearest,计算其到查询点Q(2.1,3.1)的距离dis为0.1414,然后回溯到其父节点(5,4),并判断在该父节点的其他子节点空间中是否有距离查询点Q更近的数据点。以(2.1,3.1)为圆心,以0.1414为半径画圆,如图所示。发现该圆并不和超平面y = 4交割,即这里:|Q(k) - m|=|3.1 - 4|=0.9 > 0.1414,因此不用进入(5,4)节点右子空间中去搜索。
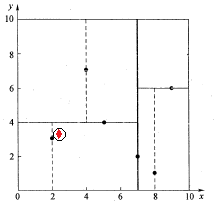
再回溯到(7,2),以(2.1,3.1)为圆心,以0.1414为半径的圆更不会与x = 7超平面交割,因此不用进入(7,2)右子空间进行查找。至此,搜索路径中的节点已经全部回溯完,结束整个搜索,返回最近邻点(2,3),最近距离为0.1414。
例二
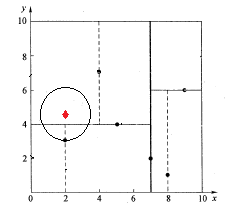
查找点Q(2,4.5)
如下图所示,同样经过二叉搜索,可得当前的最邻近点(4,7),产生的搜索路径节点有<(7,2),(5,4),(4,7)>。首先以(4,7)作为当前最近邻点nearest,计算其到查询点Q(2,4.5)的距离dis为3.202,然后回溯到其父节点(5,4),并判断在该父节点的其他子节点空间中是否有距离查询点Q更近的数据点。以(2,4.5)为圆心,以为3.202为半径画圆,如图所示。发现该圆和超平面y = 4交割,即这里:|Q(k) - m|=|4.5 - 4|=0.5 < 3.202,因此进入(5,4)节点右子空间中去搜索。所以,将(2,3)加入到搜索路径中,现在搜索路径节点有<(7,2), (2, 3)>。同时,注意:点Q(2,4.5)与父节点(5,4)的距离也要考虑,由于这两点间的距离3.04 < 3.202,所以将(5,4)赋给nearest,并且dist=3.04。
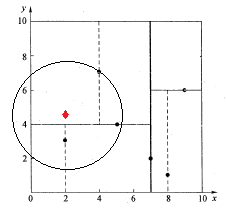
接下来,回溯至(2,3)叶子节点,点Q(2,4.5)和(2,3)的距离为1.5,比距离(5,4)要近,所以最近邻点nearest更新为(2,3),最近距离dis更新为1.5。回溯至(7,2),如图所示,以(2,4.5)为圆心1.5为半径作圆,并不和x = 7分割超平面交割,即这里:|Q(k) - m|=|2 - 7|=5 > 1.5。至此,搜索路径回溯完。返回最近邻点(2,3),最近距离1.5。
Kd树在维度较小时(比如20、30),算法的查找效率很高,然而当数据维度增大(例如:K≥100),查找效率会随着维度的增加而迅速下降。假设数据集的维数为D,一般来说要求数据的规模N满足N>>2的D次方,才能达到高效的搜索。
为了能够让Kd树满足对高维数据的索引,Jeffrey S. Beis和David G. Lowe提出了一种改进算法——Kd-tree with BBF(Best Bin First),该算法能够实现近似K近邻的快速搜索,在保证一定查找精度的前提下使得查找速度较快。
Python 实现
Python scipy.spatial 包中封装了 KDTree 的实现
1 | |
-
Parameters:
data
array_like, shape (n,m)The n data points of dimension m to be indexed. This array is not copied unless this is necessary to produce a contiguous array of doubles, and so modifying this data will result in bogus results. The data are also copied if the kd-tree is built with copy_data=True.
leafsize
positive int, optionalThe number of points at which the algorithm switches over to brute-force. Default: 10.
compact_nodes
bool, optionalIf True, the kd-tree is built to shrink the hyperrectangles to the actual data range. This usually gives a more compact tree that is robust against degenerated input data and gives faster queries at the expense of longer build time. Default: True.
**copy_data **
bool, optionalIf True the data is always copied to protect the kd-tree against data corruption. Default: False.
**balanced_tree **
bool, optionalIf True, the median is used to split the hyperrectangles instead of the midpoint. This usually gives a more compact tree and faster queries at the expense of longer build time. Default: True.
**boxsize **
array_like or scalar, optionalApply a m-d toroidal topology to the KDTree… The topology is generated by 𝑥𝑖+𝑛𝑖𝐿𝑖 where 𝑛𝑖 are integers and 𝐿𝑖 is the boxsize along i-th dimension. The input data shall be wrapped into [0,𝐿𝑖). A ValueError is raised if any of the data is outside of this bound.
-
Attributes:
data
ndarray, shape (n,m)The n data points of dimension m to be indexed. This array is not copied unless this is necessary to produce a contiguous array of doubles. The data are also copied if the kd-tree is built with copy_data=True.
leafsize
positive intThe number of points at which the algorithm switches over to brute-force.
m
intThe dimension of a single data-point.
n
intThe number of data points.
maxes
ndarray, shape (m,)The maximum value in each dimension of the n data points.
mins
ndarray, shape (m,)The minimum value in each dimension of the n data points.
size
intThe number of nodes in the tree.
-
Methods
count_neighbors(other, r[, p, weights, …]) |
Count how many nearby pairs can be formed. |
|---|---|
query(x[, k, eps, p, distance_upper_bound, …]) |
Query the kd-tree for nearest neighbors. |
query_ball_point(x, r[, p, eps, workers, …]) |
Find all points within distance r of point(s) x. |
query_ball_tree(other, r[, p, eps]) |
Find all pairs of points between self and other whose distance is at most r. |
query_pairs(r[, p, eps, output_type]) |
Find all pairs of points in self whose distance is at most r. |
sparse_distance_matrix(other, max_distance) |
Compute a sparse distance matrix. |
示例代码
1 | |
参考资料
- https://www.cnblogs.com/PythonLearner/p/12952929.html
- https://oi-wiki.org/ds/kdt/
- https://blog.csdn.net/weixin_44852067/article/details/130222731
- https://docs.scipy.org/doc/scipy/reference/generated/scipy.spatial.KDTree.html
文章链接:
https://www.zywvvd.com/notes/study/search/kd-tree/kd-tree/
“觉得不错的话,给点打赏吧 ୧(๑•̀⌄•́๑)૭”

微信支付

支付宝支付