本文最后更新于:2025年12月4日 下午
矩阵乘法可以理解为空间的映射,本文记录旋转矩阵的作用。
矩阵乘法
矩阵乘法可以理解为向量之间的投影,左侧矩阵的行向量与右侧矩阵的列向量投影作为结果。
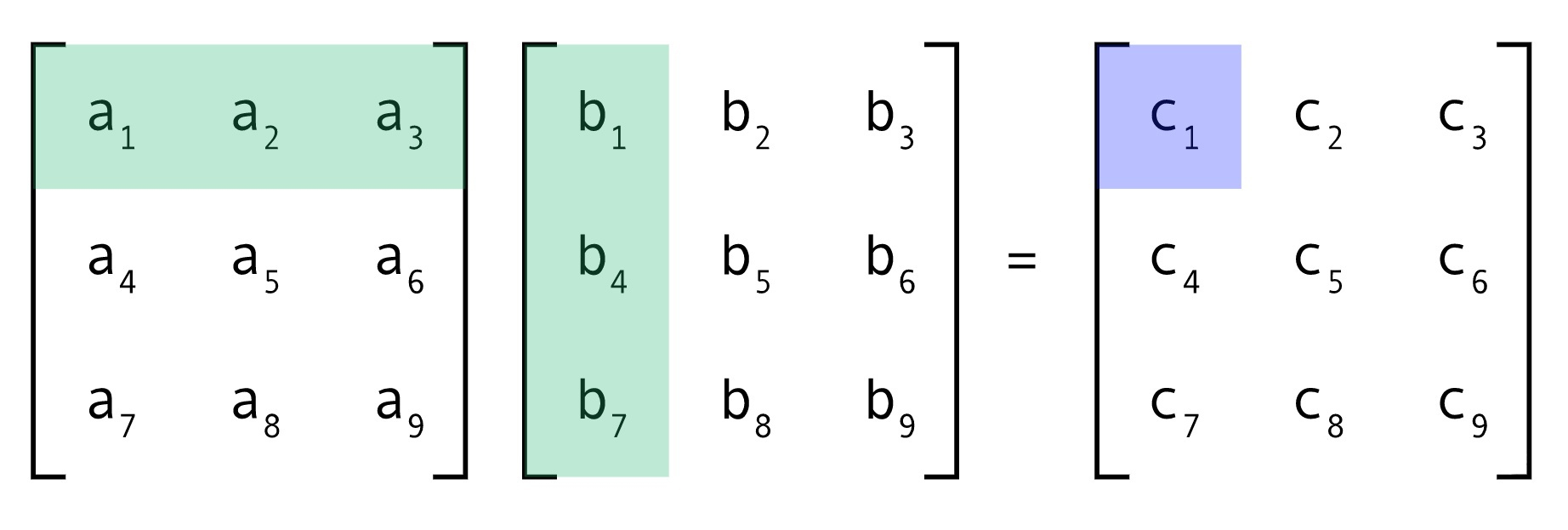
当左侧矩阵为 $N$ 维空间上的一组基时,这种乘法又可以看做是在求解原始空间中的向量 $[b_1,b_4,b_7]$ 在空间中新的基下的表示 $[c_1,c_4,c_7]$ 。
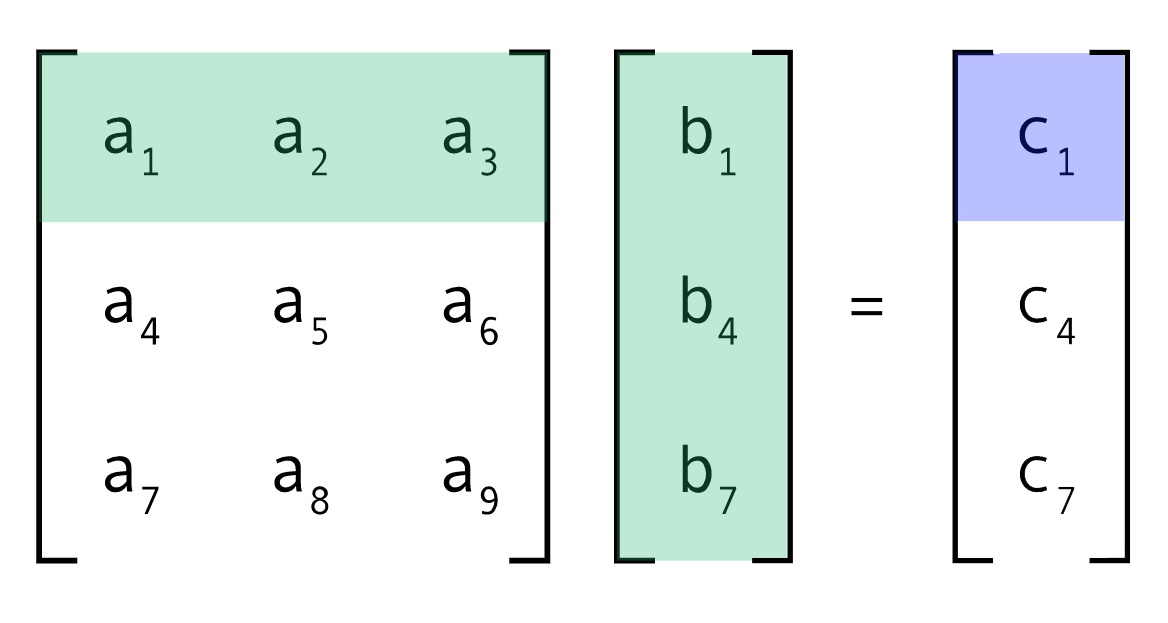
如果基的模长为1,那么求解原始空间中向量在新空间表示的长度时,其实就是原始向量在各个单位向量基上的投影长度,这也是基一般都是单位长度的原因。
旋转矩阵
旋转矩阵是特殊的单位基,用角度和三角函数表示基的大小,例如 $[\cos \theta,\sin\theta]$
这样基天然就是单位长度,而且带有可解释的含义,经过这样的基映射后,相当于原始空间的某个轴旋转了某个角度 $\theta$
旋转示例
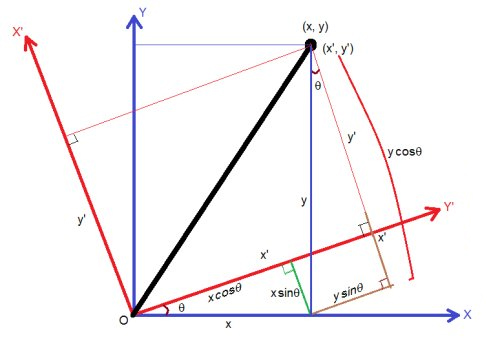
原始二维笛卡尔坐标系空间中的一点 $A(x,y)$,现将 $X$ 轴和 $Y$ 轴分别逆时针旋转 $\theta _ x$ , $\theta _ y$ 角度,之后原始的 $A$ 点在新空间有新的表示 $A’(x’,y’)$。
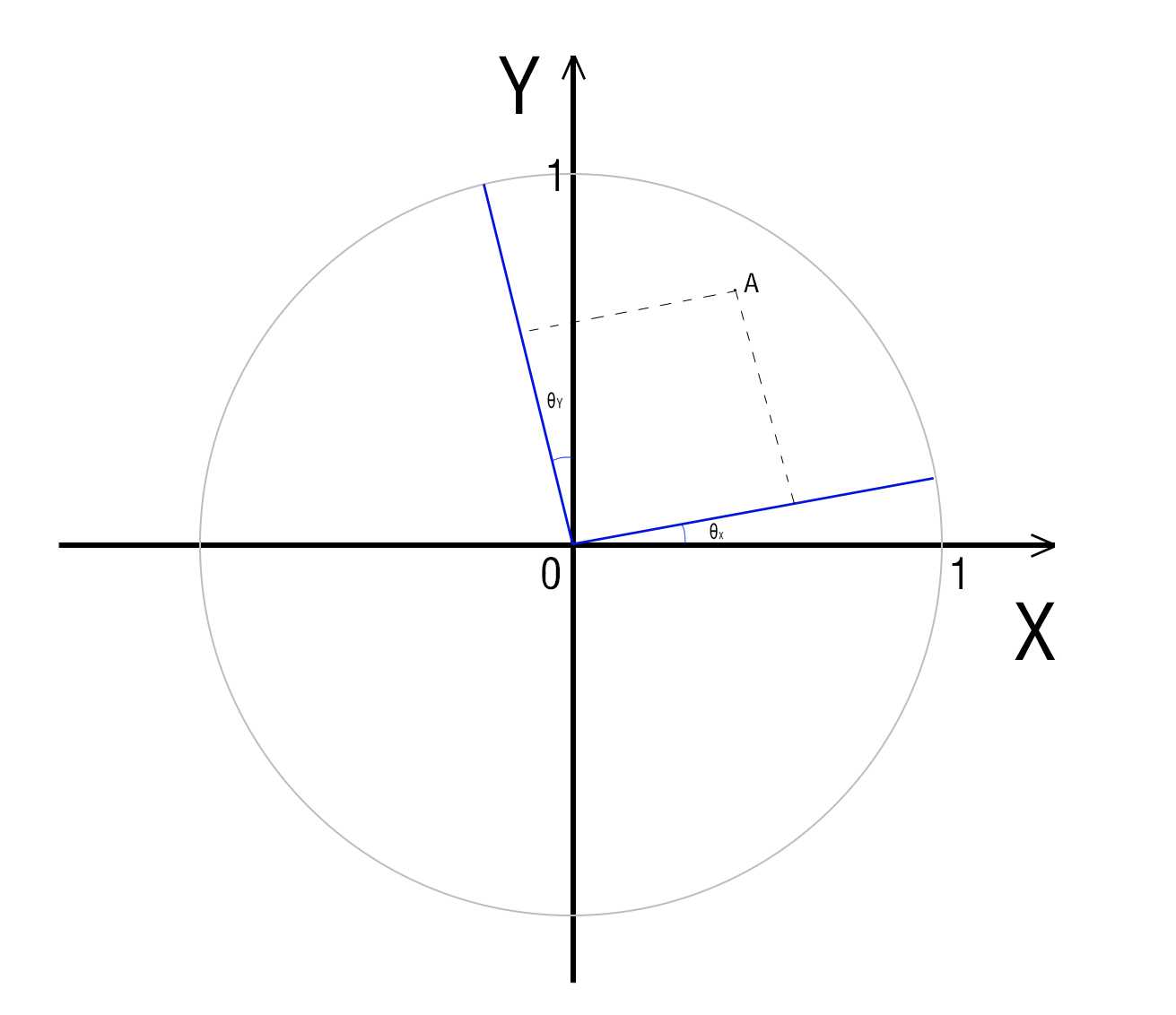
新的 $X$ 轴在原始坐标系下的单位向量为 $[\cos \theta_x,\sin \theta_x]$,新的 $Y$ 轴在原始坐标系下的单位向量为 $[-\sin \theta_y,\cos \theta_y]$
那么 $A$ 在新坐标系下的坐标为 $OA$ 向量分别到两个单位向量的投影长度:
$$ \begin{array}{l} x'=x\cos \theta_x+y\sin\theta_x\\ y'=-x\sin \theta_y+y\cos\theta_y\\ \end{array} $$这也就完成了 $A$ 的坐标系转换,用矩阵表示就是:
$$ RA= \left[\begin{array}{cc}\cos \theta_x & \sin \theta_x \\ -\sin \theta_y & \cos \theta_y\end{array}\right] \left[\begin{array}{cc}x \\ y \end{array}\right] = \left[\begin{array}{cc}x' \\ y' \end{array}\right] $$其中 $R =\left[\begin{array}{cc}\cos \theta_x & \sin \theta_x \\ -\sin \theta_y & \cos \theta_y\end{array}\right] $ 也就是旋转矩阵,这里表示的是 $X,Y$ 轴不一定垂直的特殊旋转,一般常用的旋转矩阵为 $\theta_x = \theta_y$,这里的是更一般的应用场景。
参考资料
文章链接:
https://www.zywvvd.com/notes/study/linear-algebra/rotate-matrix/rotate-matrix/
“觉得不错的话,给点打赏吧 ୧(๑•̀⌄•́๑)૭”

微信支付

支付宝支付