本文最后更新于:2024年5月7日 下午
简单来说,“仿射变换”就是:“线性变换”+“平移”,本文记录相关内容。
线性变换
之前我们整理过 线性变换 相关的知识,核心有三点:
- 变换前是直线的,变换后依然是直线
- 直线比例保持不变
- 变换前是原点的,变换后依然是原点
仿射变换
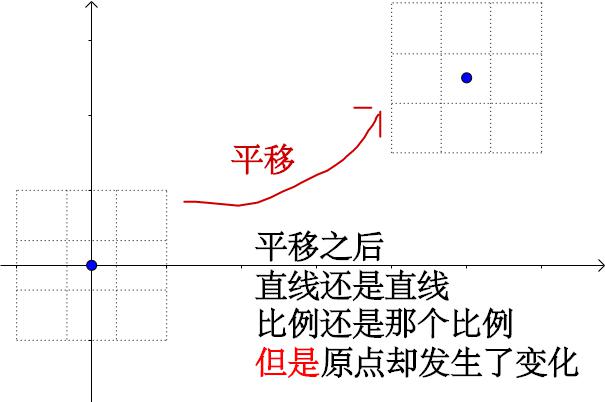
在 线性变换 中其实也提到了仿射变换,当时就定性了平面上二维仿射变换不是线性变换,因为原点会移动。
仿射变换从几何直观只有两个要点:
-
变换前是直线的,变换后依然是直线
-
直线比例保持不变
相比于线性变换就是不再保持原点的自我映射
$ A $ 为一 $ n \times n $ 阶实矩阵,对于现有 $n$ 维向量 $\textbf{x}$,针对他的仿射变换就是线性变换和平移变换的叠加,$ \mathbf{b} $ 是 $ n $ 维向量,定义于几何空间 $ \mathbb{R}^{n} $ 的仿射变换具有下列形式:
$$
T(\mathbf{x})=A \mathbf{x}+\mathbf{b}
$$
也就是说,仿射变换由一线性变换加上一平移量构成。因为 $ T(\mathbf{0})=\mathbf{b} $ 。除非平移量 $ \mathbf{b} $ 为零,仿射变换才是线性变换。仿射变换有两个特殊的性质:共线(collinearity)不变性和比例不变性,意思是 $ \mathbb{R}^{n} $ 的任一直线经仿射变换的像(image)仍是一直线,而且直线上各点之间的距离比例维持不变。
通过线性变换来完成仿射变换
$ \vec{y}=A \vec{x}+\vec{b} $ 可以写作 $ \left[\begin{array}{l}\vec{y} \\ 1\end{array}\right]=\left[\begin{array}{cc}A & \vec{b} \\ 0 & 1\end{array}\right]\left[\begin{array}{l}\vec{x} \\ 1\end{array}\right] $
即虽然在当前维度下仿射变换不是线性变换,但可以通过升维,实现通过高维线性变换完成低维仿射变换的效果。
引用马同学的解释:
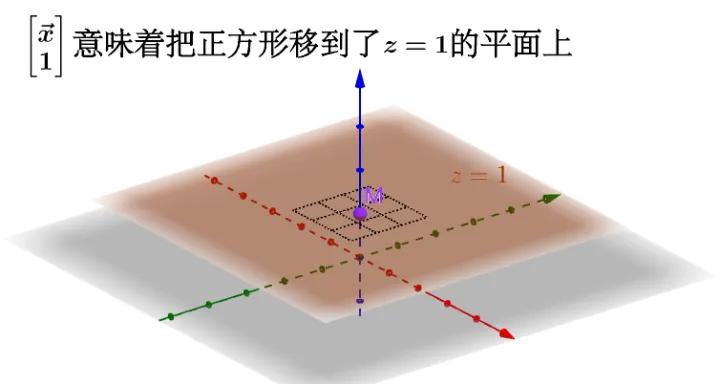
这样我就可以在二维空间下通过 $ \left[\begin{array}{cc}A & \vec{b} \\ 0 & 1\end{array}\right] $ 这个线生变换来喿作 $ z=1 $ 平面上的二维正方形,完成仿射变换:
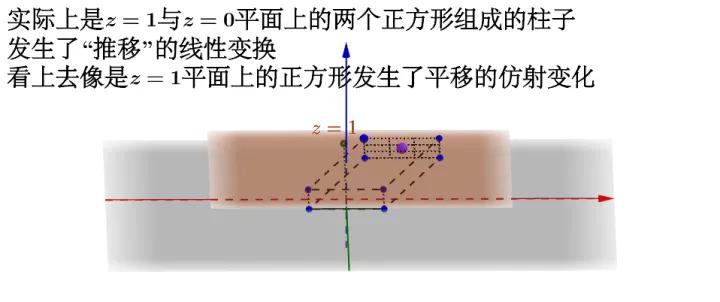
维基百科 中有动图形象地揭示了这个过程:
常见的仿射变换
仿射变换主要有旋转、平移、缩放、错切四种常见变换以及他们的任意组合形式。
| 变换名称 | 变换矩阵 | 示例 |
|---|---|---|
| 恒等变换 | $\left[\begin{array}{lll}1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1\end{array}\right]$ |  |
| 平移 | $\left[\begin{array}{ccc}1 & 0 & v_{x}>0 \\ 0 & 1 & v_{y}=0 \\ 0 & 0 & 1\end{array}\right]$ |  |
| 翻转 | $\left[\begin{array}{ccc}-1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1\end{array}\right]$ |  |
| 缩放 | $\left[\begin{array}{ccc}c_{x}=2 & 0 & 0 \\ 0 & c_{y}=1 & 0 \\ 0 & 0 & 1\end{array}\right]$ |  |
| 旋转 | $\left[\begin{array}{ccc}\cos (\theta) & -\sin (\theta) & 0 \\ \sin (\theta) & \cos (\theta) & 0 \\ 0 & 0 & 1\end{array}\right]$ | 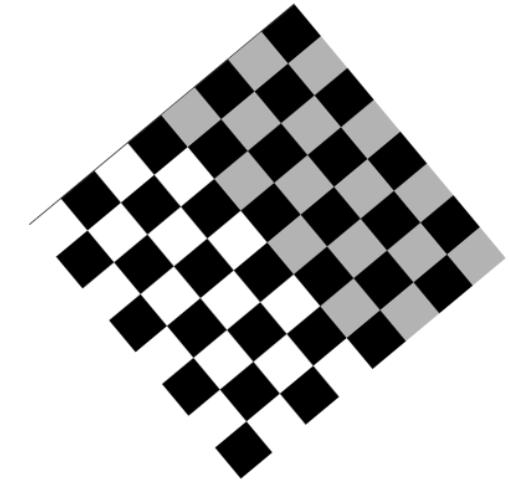 |
| 错切 | $\left[\begin{array}{ccc}1 & c_{x}=0.5 & 0 \\ c_{y}=0 & 1 & 0 \\ 0 & 0 & 1\end{array}\right]$ | 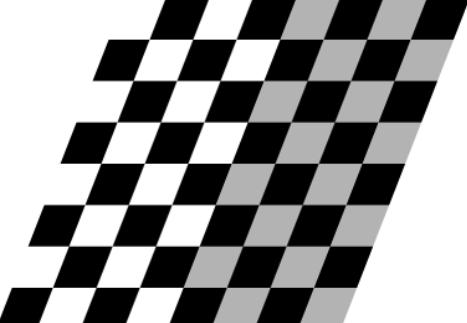 |
求解仿射变换矩阵
我接触图像数据比较多,这里以平面仿射变换为例,高维仿射变换以此类推。
平面的仿射变换我们已经清楚,其本质就是二维线性变换叠加平移,那么未知参数就是二维线性变换的矩阵,维度为 $2\times2$,平移参数 $1\times2$,共 6 个参数
也可以理解为 $ x’ = Ax + by +C; y’ = Dx + Ey +F $,求解 6 个未知参数
对于这种情况最小需要 6 个方程用于求解,每有一对点就会获取两个方程,因此三对点可以确定一个二维仿射变换矩阵。
如果点对比较多,可以用最小二乘一类的方式求解,来降低误差对结果的影响。
OpenCV 实现仿射变换
OpenCV 中的仿射函数为 cv2.warpAffine() ,其通过一个变换矩阵(映射矩阵)M实现变换,具体为:
$$
dst(x, y)=src(M_{11}x+M_{12}y+M_{13}, M_{21}x+M_{22}y+M_{23})
$$
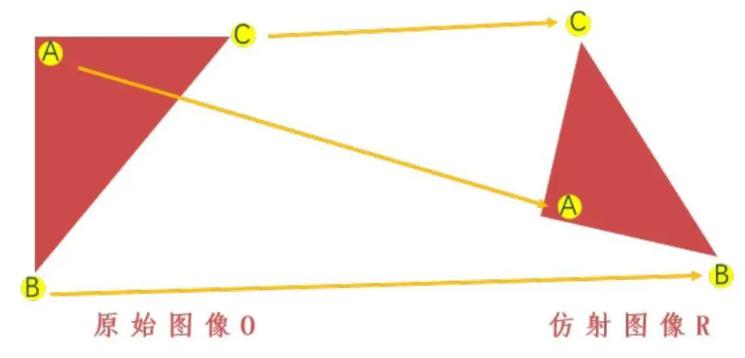
可以通过一个变换矩阵 $M$,将原始图像 $O$ 变换为仿射图像 $R$。
因此,可以采用仿射函数 cv2.warpAffine() 实现对图像的旋转,该函数的语法格式如下:
1 | |
| 参数 | 含义 |
|---|---|
| src | 要仿射的原始图像 |
| dst | 仿射后的输出图像,该图像的类型和原始图像的类型相同。dsize决定输出图像的实际大小 |
| M | 2×3的变换矩阵。使用不同的变换矩阵,就可以实现不同的仿射变换 |
| dsize | 输出图像的尺寸大小 |
| flags | 插值方法,默认为INTER_LINEAR。当该值为WARP_INVERSE_MAP时,意味着 $M$ 是逆变换类型,实现从目标图像 dst 到原始图像 src 的逆变换 |
| borderMode | 边类型,默认为 BORDER_CONSTANT。当该值为 BORDER_TRANSPARENT 时,意味着目标图像内的值不做改变,这些值对应原始图像内的异常值 |
| borderValue | 边界值,默认是 0。 |
在 OpenCV 中使用函数 cv2.warpAffine() 实现仿射变换,忽略其可选参数后的语法格式为:
1 | |
参考资料
- https://www.zhihu.com/question/20666664
- https://www.zywvvd.com/notes/study/linear-algebra/linear-trans/linear-trans/
- https://zhuanlan.zhihu.com/p/377667045
- https://zh.m.wikipedia.org/wiki/仿射变换
- https://en.wikipedia.org/wiki/Affine_transformation
- https://www.jianshu.com/p/6ba84e583279
文章链接:
https://www.zywvvd.com/notes/study/linear-algebra/affine-trans/affine-trans/
“觉得不错的话,给点打赏吧 ୧(๑•̀⌄•́๑)૭”

微信支付

支付宝支付