本文最后更新于:2024年5月11日 下午
霍夫变换(Hough Transform)是一个关于图像领域类的一个算法,被用来检测图像中的各类曲线,直线,圆,椭圆等等,本文记录相关内容与 OpenCV 实现。
霍夫变换 (Hough Transform)
Hough(霍夫)变换是一种用于检测线、圆或者图像中其他简单形状的方法。最初Hough变换是一种线变换,这是一种相对较快的检测二值图像中直线的方法,可以进一步推广到除简单线之外的情况。
霍夫线变换
- 在笛卡尔坐标系下存在很多直线,直线可以用
点截式表示,假设笛卡尔坐标下的两个点$A=(X_1,Y_1)$和$B=(X_2,Y_2)$:
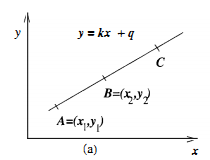
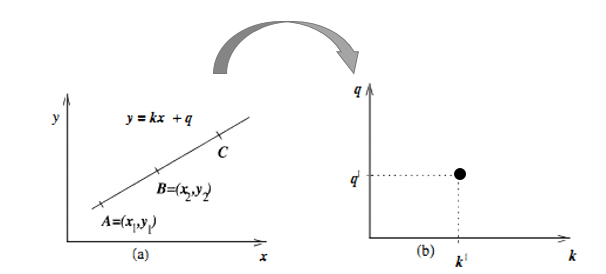
- 在笛卡尔坐标系下两点确定的直线为 $y=kx+q$,考虑已知的 $A,B$ 两点,则可以确定唯一的 $k,q$:
$$
\left{\begin{array}{l}q=-k x_{1}+y_{1} \ q=-k x_{2}+y_{2}\end{array}\right.
$$
- 若以$k,q$为自变量、因变量可以绘制
霍夫坐标系,那么笛卡尔坐标系下的直线则对应霍夫坐标系下的一个点:
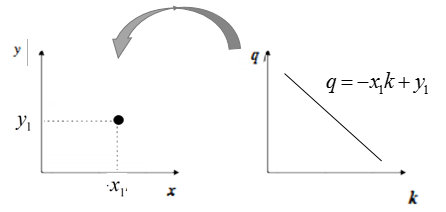
- 相反,考虑在笛卡尔坐标系下的一个点$(x_1,y_1)$ ,过这一点的直线方程为:
$$
q=-x_{1} k+y_{1}
$$
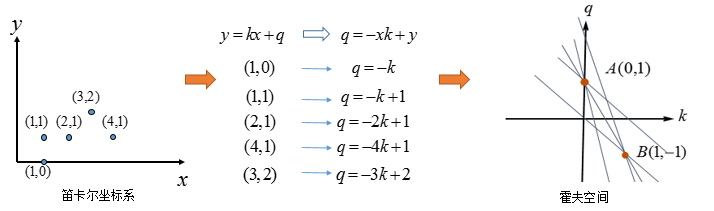
- 此时该方程表示霍夫空间下的一条直线:
- 当笛卡尔坐标中有两个点时,对应霍夫空间的两条直线表示:

- 如果有三个共线的点:
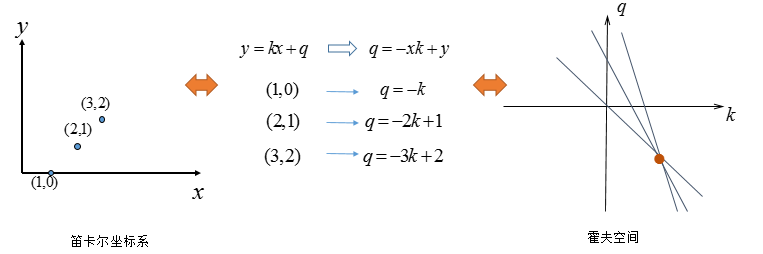
-
可以看到笛卡尔坐标下共线的点在霍夫空间交于一点,因为笛卡尔坐标系下的直线对应霍夫空间中的一个点
-
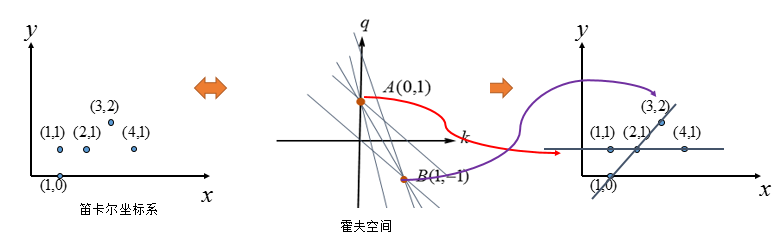
当有多个点的情况时:
- 其实$(3,2)$与$(4,1)$也可以组成直线,只不过它有两个点确定,而图中A、B两点是由三条直线汇成,这也是霍夫变换的后处理的基本方式:选择由尽可能多直线汇成的点。
- 因此我们在霍夫空间确定$A, B$ 两个点确定的笛卡尔坐标下的直线
- 然而斜截式表示竖线是不方便的
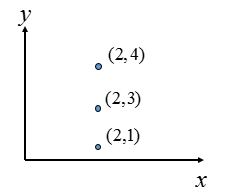
- $k=∞$是不方便表示的,因此考虑将笛卡尔坐标系换为:极坐标表示。

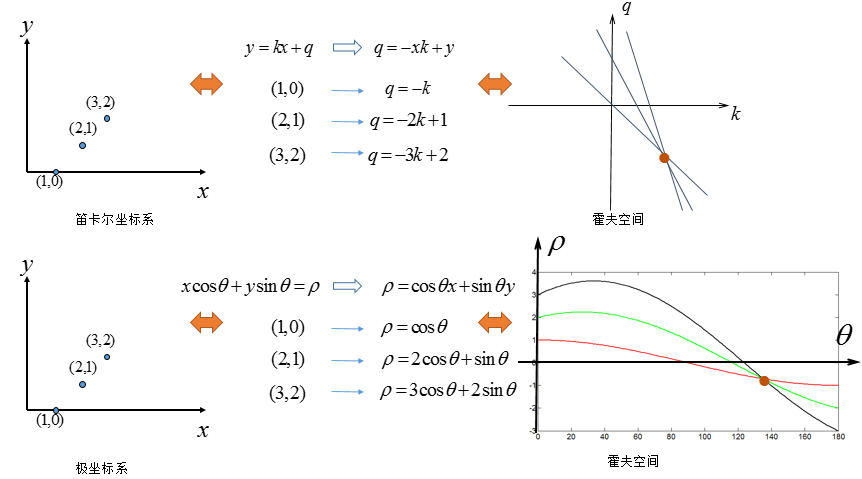
- 在极坐标系下,其实是一样的:极坐标的点→霍夫空间的直线,只不过霍夫空间不再是$[k,q]$的参数,而是$ [\rho, \theta] $:
算法步骤
- 初始化累加器 $H$ 全零
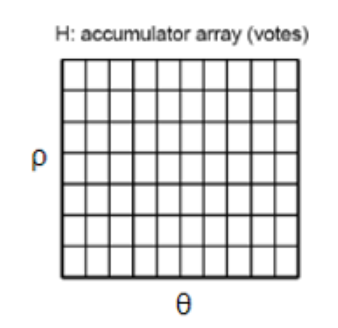
- 遍历图像中的每一个边缘点
1 | |
- 找到 $H$ 中局部最大值的点
- 将点 $(\theta, \rho)$ 转换为图像中的直线
$$
\rho=x \cos \theta+y \sin \theta
$$
cv2.HoughLines
使用标准霍夫变换查找二值图像中的直线。
- 函数使用
1 | |
- 示例代码
1 | |

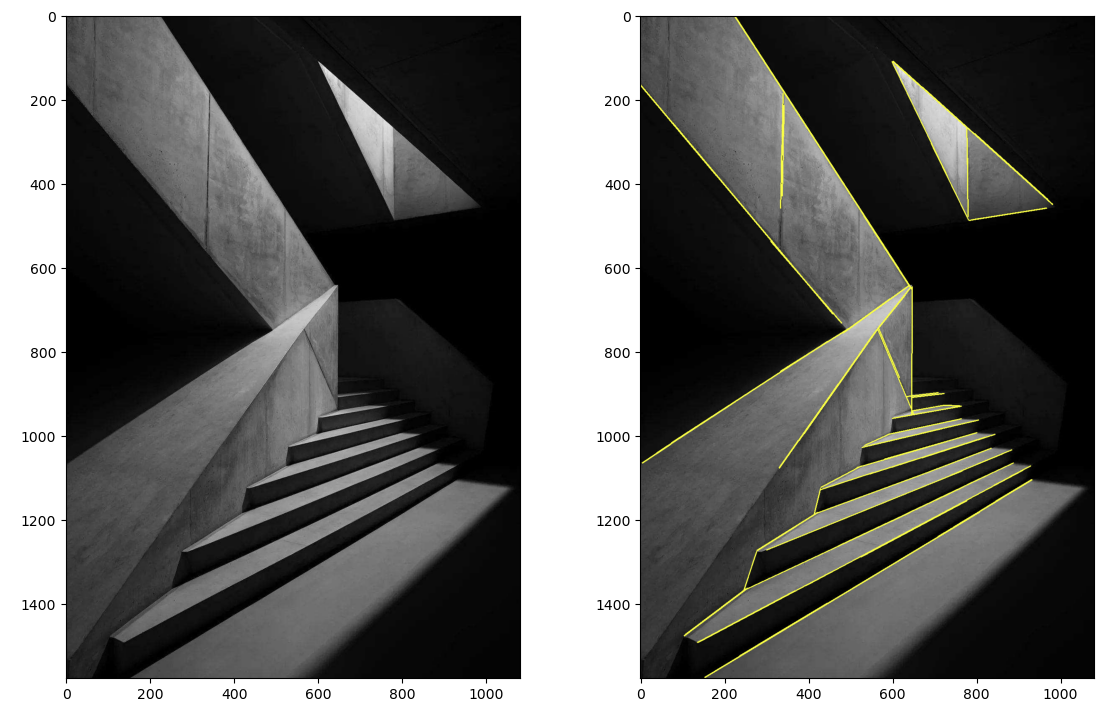
概率霍夫变换(Progressive Probabilistic Hough Transform)
霍夫变换用于检测直线的缺点
-
霍夫变换只是寻找图像中边缘像素的对齐区域,有些像素只是碰巧排成了直线,因此可能产生错误的检测结果;
-
可能因为多条参数相近的直线穿过了同一个像素对齐区域,而导致出现重复的结果。
算法流程
-
为了解决上述问题并检测到线段,可以利用概率霍夫变换解决。
-
概率霍夫变换算法的复杂度增加,但可以在扫描直线的过程中清除部分像素点,减少投票过程中用到的像素点。
-
随机获取边缘图像上的前景点,映射到极坐标系画曲线;
不是系统性地逐行扫描图像
-
一旦累加器的某个入口处到达了预设的最小值,就沿着对应的直线扫描图像,并移除这条直线上的所有像素点
删除点时包括还没投票的像素点
-
搜索边缘图像上前景点,在直线L上的点(且点与点之间距离小于maxLineGap的)连成线段,然后这些点全部删除,并且记录该线段的参数(起始点和终止点),当然线段长度要满足最小长度;
这个扫描过程还检测可以接受的线段长度。为此,算法定义两个额外的参数:一个是允许的线段最小长度,另一个是组成线段时允许的最大像素距离。
-
重复1. 2. 3。
cv2.HoughLinesP
用于实现概率霍夫变换寻找边缘中的直线
- 函数使用
1 | |
- 示例代码
1 | |
霍夫圆变换
Hough圆变换的方法与之前描述的线变换方法相似。粗略解释的话,就是如果你想尝试用完全类似的方法去做,就要从累加平面变成累加三维的体积,三维坐标分别是圆心的位置x、y和圆的半径r。但这样做意味着更大的内存需求和更慢的速度。OpenCV中圆变换的实现通过采用一种称为Hough梯度法的较为复杂的方法来避免了这个问题。
理论方法
- 图像坐标空间中的一条已知的曲线方程也可以建立其相应的参数空间。由此,图像坐标空间中的一点,在参数空间中就可以映射为相应的轨迹曲线或者曲面。
- 若参数空间中对应各个间断点的曲线或者曲面能够相交,就能找到参数空间的极大值以及对应的参数;若参数空间中对应各个间断点的曲线或者曲面不能相交,则说明间断点不符合某已知曲线。
- Hough变换做曲线检测时,最重要的是写出图像坐标空间到参数空间的变换公式。
- 对于已知的圆方程,其直角坐标的一般方程为:
- 其中,$(a,b)$为圆心坐标,$r$为圆的半径。那么,参数空间可以表示为$(a,b,r)$,图像坐标空间中的一个圆对应参数空间中的一个点。
- 笛卡尔坐标空间中的一个点,对应霍夫三维空间中的一个’漏斗’。
- 图中可以看到笛卡尔坐标系下的圆$x2+y2=1$ 上的三个点对应霍夫空间的三个’漏斗’:
其中 $i \in { 1,2,3 }$
- 三个’漏斗’(取 $r > 0$ 的部分)的交点为 $(0, 0, 1)$,表明这个圆对应霍夫空间的点。
OpenCV 实现思路
Hough圆变换的方法与之前描述的线变换方法相似。粗略解释的话,就是如果你想尝试用完全类似的方法去做,就要从累加平面变成累加三维的体积,三维坐标分别是圆心的位置x、y和圆的半径r。但这样做意味着更大的内存需求和更慢的速度。OpenCV中圆变换的实现通过采用一种称为Hough梯度法的较为复杂的方法来避免了这个问题。
- 在用霍夫变换检测圆的实现中使用两轮筛选。
- 检测边缘发现可能的圆心,第一轮筛选使用一个二维累加器,找到可能的圆的位置。因为圆上像素点的梯度方向与半径方向是一致的,所以对每个像素点来说,累加器只对沿着梯度方向的入口增加计数(根据预先定义的最小和最大半径值)。
- 一旦检测到可能的圆心(即收到预定数量的投票),就在第二轮筛选中建立半径值范围的一维直方图。这个直方图的尖峰就是被检测圆的半径
OpenCV 霍夫圆变换
Hough梯度法工作过程如下。
-
首先,对图像进行边缘检测(可以使用
cv2.Canny()); -
对每个轮廓图像中的非零点,考虑局部梯度(我们通过首先通过
cv2.Sobel()计算一阶 Sobel x-导数 和 y-导数 来计算梯度)。通过这个梯度,我们沿着这个斜率表示的线在累加器内从一个最小值到一个最大值遍历每个点,同时,记录轮廓图像中每个非零像素所在的位置。
-
然后候选圆心就从这些(二维)累加器中分离出来,这些点都高于一个阈值且同时大于其所有直接相邻的点。这些点根据其累加器值的降序排列,使得最有可能是圆心的点排在前面。
-
对于每个圆心,考虑所有非零像素点(之前已经构建好该列表),将这些像素根据离圆心的距离排序。从最小距离到最大半径中选择一个最好的值作为圆的半径。
-
如果有足够数量的点组合成一个圆并且其圆心与之前选中圆心的距离足够大,就保留这个圆心。
官方贴士:
通常该函数能很好地检测出圆的中心。但是,它可能无法找到正确的半径。您可以通过指定半径范围(minRadius 和 maxRadius)来辅助函数。或者,在 HOUGH_gradient 方法的情况下,您可以将 maxRadius 设置为一个负数,只返回中心而不进行半径搜索,并使用另一个程序找到正确的半径。
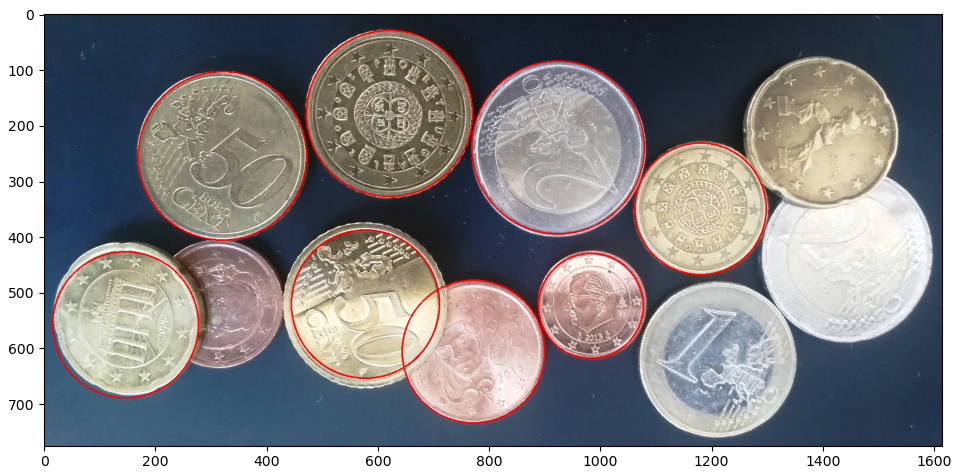
cv2.HoughCircles
OpenCV 实现霍夫圆变换的函数
- 函数使用
1 | |
- 示例代码
cv2.HOUGH_GRADIENT
1 | |
-
cv2.HOUGH_GRADIENT- 第一,用 Sobel 导数计算局部梯度一伴随的假设是这可以被认为相当于一个局部切线一不是一个数值稳定的命题,甚至“大部分时间”都是这样,但是你应该期望在输出中产生一些噪音。
- 第二,对每个候选圆心进行判断时要考虑轮廓图像中所有非零像素。因此,如果累加器阈值过低,算法就会很慢。
- 第三,因为对每个圆心都只能选择一个圆,所以如果出现同心圆,最终将只能得到一个。最后,由于圆心根据累加器值升序排列,并且圆心距离先前被被接受的圆心太近时会被舍去,因而出现同心或近似同心圆时,算法更倾向于保留大圆。(由于Sobel导数产生的噪声,它只是一种“倾向”,但在无限分辨率下的平滑图像中,它就是必然的了。)
部分问题在新版本的算法
cv2.HOUGH_GRADIENT_ALT中得到了改进 -
示例代码
cv2.HOUGH_GRADIENT_ALT
1 | |

参考资料
- 《学习 OpenCV3》 第十二章
- https://www.cnblogs.com/php-rearch/p/6760683.html
- https://www.cnblogs.com/wangduo/p/6272972.html
- https://blog.csdn.net/gehulushang/article/details/104959236
文章链接:
https://www.zywvvd.com/notes/study/image-processing/opencv/opencv-hough/opencv-hough/
“觉得不错的话,给点打赏吧 ୧(๑•̀⌄•́๑)૭”

微信支付

支付宝支付