本文最后更新于:2024年5月11日 下午
图像中存在很多物体拐角,本文记录像素级角点检测算法 Harris 和 Shi Tomasi。
角点简介
在现实世界中,角点对应于物体的拐角,道路的十字路口、丁字路口等。从图像分析的角度来定义角点可以有以下两种定义:
- 角点可以是两个边缘的角点;
- 角点是邻域内具有两个主方向的特征点;
一提到角点检测,最常用的方法莫过于Harris角点检测,opencv 中也提供了 Harris 角点检测的接口,即cornerHarris(),但是 Harris 角点检测存在很多缺陷(如角点是像素级别的,速度较慢等),opencv 中有另一个功能更为强大的函数— goodFeaturesToTrack(),它不仅支持 Harris 角点检测,也支持 Shi Tomasi 算法的角点检测。但是,该函数检测到的角点依然是像素级别的。
角点检测基本原理
人眼对角点的识别通常是在一个局部的小区域或小窗口完成的。如果在各个方向上移动这个特征的小窗口,窗口内区域的灰度发生了较大的变化,那么就认为在窗口内遇到了角点。如果这个特定的窗口在图像各个方向上移动时,窗口内图像的灰度没有发生变化,那么窗口内就不存在角点;如果窗口在某一个方向移动时,窗口内图像的灰度发生了较大的变化,而在另一些方向上没有发生变化,那么,窗口内的图像可能就是一条直线的线段。

对于图像 $I(x,y)$,当在点 $(x,y)$ 处平移 $(\Delta x,\Delta y)$ 后的自相似性,可以通过自相关函数给出:
$$
c(x, y ; \Delta x, \Delta y)=\sum_{(u, v) \in W(x, y)} w(u, v)(I(u, v)-I(u+\Delta x, v+\Delta y))^{2}
$$
其中, $ W(x, y) $ 是以点 $ (x, y) $ 为中心的窗口, $ w(u, v) $为加权函数,它既可是常数,也可以是高斯加权函数。

根据泰勒展开,对图像 $ I(x, y) $ 在平移 $ (\Delta x, \Delta y) $ 后进行一阶近似:
$$
I(u+\Delta x, v+\Delta y)=I(u, v)+I_{x}(u, v) \Delta x+I_{y}(u, v) \Delta y+O\left(\Delta x^{2}, \Delta y^{2}\right) \approx I(u, v)+I_{x}(u, v) \Delta x+I_{y}(u, v) \Delta y
$$
其中, $ I_{x}, I_{y} $ 是图像 $ I(x, y) $ 的偏导数,这样的话,自相关函数则可以简化为:
$$
c(x, y ; \Delta x, \Delta y) \approx \sum_{w}\left(I_{x}(u, v) \Delta x+I_{y}(u, v) \Delta y\right)^{2}=[\Delta x, \Delta y] M(x, y)\left[\begin{array}{l}\Delta x \ \Delta y\end{array}\right]
$$
其中:
$$
\begin{array}{c}M(x, y)&=&\sum_{w}\left[\begin{array}{cc}I_{x}(x, y)^{2} & I_{x}(x, y) I_{y}(x, y) \ I_{x}(x, y) I_{y}(x, y) & I_{y}(x, y)^{2}\end{array}\right]\&=&\left[\begin{array}{cc}\sum_{w} I_{x}(x, y)^{2} & \sum_{w} I_{x}(x, y) I_{y}(x, y) \ \sum_{w} I_{x}(x, y) I_{y}(x, y) & \sum_{w} I_{y}(x, y)^{2}\end{array}\right] \ &=&\left[\begin{array}{ll}A & C \ C & B\end{array}\right]\end{array}
$$
也就是说图像 $ I(x, y) $ 在点 $ (x, y) $ 处平移 $ (\Delta x, \Delta y) $ 后的自相关函数可以近似为二项函数:
$$
c(x, y ; \Delta x, \Delta y) \approx A \Delta x^{2}+2 C \Delta x \Delta y+B \Delta y^{2}
$$
其中:
$$
A=\sum_{w} I_{x}^{2}, B=\sum_{w} I_{y}^{2}, C=\sum_{w} I_{x} I_{y}
$$
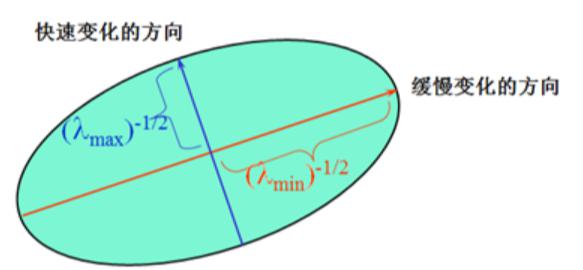
二次项函数本质上就是一个椭圆函数。椭圆的扁率和尺寸是由 $ M(x, y) $ 的特征值 $ \lambda_{1} 、 \lambda_{2} $ 决定的,椭圆的方向是由 $ M(x, y) $ 的特征矢量决定的,如下图所示,椭圆方程为:
$$
[\Delta x, \Delta y] M(x, y)\left[\begin{array}{l}\Delta x \ \Delta y\end{array}\right]=1
$$
Harris角点算法实现
根据上述讨论,可以将 Harris 图像角点检测算法归纳如下,共分以下五步:
-
计算图像 $I(x,y)$ 在 $X$ 和 $Y$ 两个方向的梯度$I_x、I_y$。
$$
I_{x}=\frac{\partial I}{\partial x}=I \otimes(-101), I_{y}=\frac{\partial I}{\partial x}=I \otimes(-101)^{T}
$$ -
计算图象两个方向梯度的乘积。
$$
I_{x}^{2}=I_{x} \cdot I_{y}, I_{y}^{2}=I_{y} \cdot I_{y}, I_{x y}=I_{x} \cdot I_{y}
$$ -
使用高斯函数对 $ I_{x}^{2} 、 I_{y}^{2} $ 和 $ I_{x y} $ 进行高斯加权 ( 取 $ \sigma=1 $ ),生成矩阵 $ M $ 的元素 $ A 、 B $ 和 $ C $ 。
$$ A=g\left(I_{x}^{2}\right)=I_{x}^{2} \otimes w, C=g\left(I_{y}^{2}\right)=I_{y}^{2} \otimes w, B=g\left(I_{x, y}\right)=I_{x y} \otimes w $$ -
计算每个像素的
$$ R=\left\{R: \operatorname{det} \boldsymbol{M}-\alpha(\text { trace } \boldsymbol{M})^{2}Harris响应值 $R$ ,并对小于某一阈值的 $R$ 置为零。在 $ 3 \times 3 $ 或 $ 5 \times 5 $ 的邻域内进行非最大值抑制,局部最大值点即为图像中的角点。
其中:
$$
M(x, y)=\sum_{w}\left[\begin{array}{cc}I_{x}(x, y)^{2} & I_{x}(x, y) I_{y}(x, y) \ I_{x}(x, y) I_{y}(x, y) & I_{y}(x, y)^{2}\end{array}\right]=\left[\begin{array}{cc}\sum_{w} I_{x}(x, y)^{2} & \sum_{w} I_{x}(x, y) I_{y}(x, y) \ \sum_{w} I_{x}(x, y) I_{y}(x, y) & \sum_{w} I_{y}(x, y)^{2}\end{array}\right]=\left[\begin{array}{cc}A & C \ C & B\end{array}\right]
$$
$M$ 矩阵特征值
$M(x,y)$ 的特征值由$ \lambda_{1}, \lambda_{2} \leq $组成,特征值$ \lambda_{1}, \lambda_{2} \leq $与图像中的角点、直线(边缘)和平面之间的关系如下图所示:
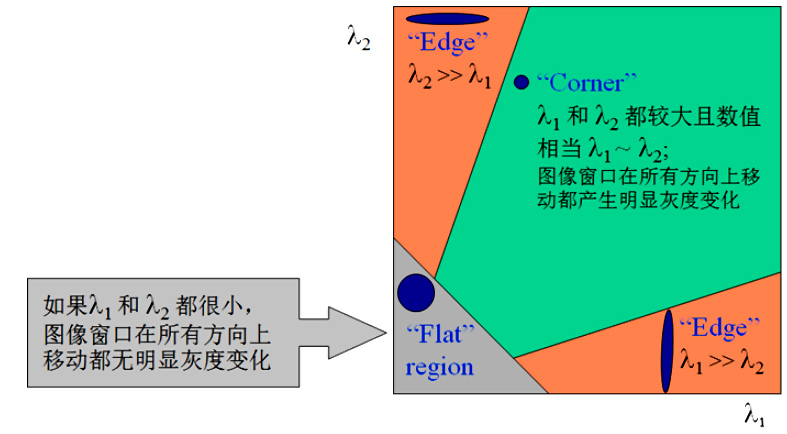
分为三种情况:
- 图像中的直线。一个特征值大,另一个特征值小,$λ1≫λ2$ 或 $λ2≫λ1$。自相关函数值在某一方向上大,在其他方向上小。
- 图像中的平面。两个特征值都小,且近似相等;自相关函数数值在各个方向上都小。
- 图像中的角点。两个特征值都大,且近似相等,自相关函数在所有方向都增大。
Harris 角点判定
根据二次项函数特征值的计算公式,我们可以求 $ M(x, y) $ 矩阵的特征值。但是 Harris 给出的角点差别方法并不需要计 算具体的特征值,而是计算一个角点响应值 $ R $ 来判断角点。 $ R $ 的计算公式为 :
$$
R=\operatorname{det} \boldsymbol{M}-\alpha(\operatorname{trace} M)^{2}
$$
式中, $ \operatorname{det} \boldsymbol{M} $ 为矩阵 $ \boldsymbol{M}=\left[\begin{array}{ll}A & B \ B & C\end{array}\right] $ 的行列式,$trace$ $ M $ 为矩阵 $ M $ 的迹,$α$ 为常数,取值范围为 $0.04~0.06$。事实上,特征隐含在 $\det M$和 $\operatorname{trace} M$中,因为:
$$
\begin{array}{c}
\operatorname{det} \boldsymbol{M}=\lambda_{1} \lambda_{2}=A C-B^{2} \
\operatorname{trace} M=\lambda_{1}+\lambda_{2}=A+C
\end{array}
$$
影响结果的因素
-
增大阈值,检测到的角点会减少;
-
增大 $α$ 的值,将减小角点响应值 $R$,降低角点检测的灵性,减少被检测角点的数量;
-
减小 $α$ 值,将增大角点响应值 $R$,增加角点检测的灵敏性,增加被检测角点的数量;
-
同时邻域的大小也会影响角点的检测。
Shi Tomasi 算法
Shi Tomasi 算法,与 Harris 角点检测的区别主要是阈值标准不一样。
Harris 角点采用 $det(M)-α \operatorname{trace}(M)^2$;
Shi Tomasi 算法采用 $min(λ_2,λ_1)$,与阈值进行比较。
OpenCV 对应算子
cornerHarris 函数用于在 OpenCV 中运行 Harris 角点检测算子处理图像。和 cornerMinEigenVal( ) 以及 cornerEigenValsAndVecs( ) 函数类似,cornerHarris 函数对于每一个像素 (x,y) 在 $blockSize*blockSize$ 邻域内,计算 $2 \times 2$ 梯度的协方差矩阵 $M(x,y) $,接着它计算如下式子:
$$
\operatorname{dst}(x, y)=\operatorname{det} M^{(x, y)}-k \cdot\left(\operatorname{tr} M^{(x, y)}\right)^{2}
$$
cornerHarris
函数定义:
1 | |
参数说明:
| 参数名 | 描述 |
|---|---|
| src | 输入的单通道 8-bit 或浮点图像。 |
| dst | 存储着 Harris 角点响应的图像矩阵,大小与输入图像大小相同,是一个浮点型矩阵。 |
| blockSize | 邻域大小。 |
| apertureSize | 扩展的微分算子大。 |
| k | 响应公式中的,参数$α$。 |
| boderType | 边界处理的类型。 |
goodFeaturesToTrack
函数定义:
1 | |
参数说明:
| 参数名 | 描述 |
|---|---|
| image | 输入图像(8位或32位单通道图)。 |
| corners | 检测到的所有角点,类型为vector或数组,由实际给定的参数类型而定。如果是vector,那么它应该是一个包含cv::Point2f的vector对象;如果类型是cv::Mat,那么它的每一行对应一个角点,点的x、y位置分别是两列。 |
| maxCorners | 用于限定检测到的点数的最大值。 |
| qualityLevel | 表示检测到的角点的质量水平(通常是0.10到0.01之间的数值,不能大于1.0)。 |
| minDistance | 用于区分相邻两个角点的最小距离(小于这个距离得点将进行合并)。 |
| mask | 如果指定,它的维度必须和输入图像一致,且在 mask 值为 0 处不进行角点检测。 |
| blockSize | 表示在计算角点时参与运算的区域大小,常用值为3,但是如果图像的分辨率较高则可以考虑使用较大一点的值。 |
| useHarrisDetector | 用于指定角点检测的方法,如果是 true 则使用 Harris 角点检测,false 则使用Shi Tomasi 算法。 |
| k | 在使用Harris算法时使用,最好使用默认值0.04。 |
Python 实现
测试图像:

示例代码:
1 | |
结果展示:

参考资料
文章链接:
https://www.zywvvd.com/notes/study/image-processing/corner-det/corner-pix/
“觉得不错的话,给点打赏吧 ୧(๑•̀⌄•́๑)૭”

微信支付

支付宝支付