本文最后更新于:2025年4月30日 下午
飞行器姿态变换过程中经常用到各种坐标系和坐标转换,本文记录相关内容。
视频教程
无人机DIY入门系列教程:(三)姿态解算上:姿态角、欧拉角与旋转矩阵
坐标系介绍
物体的位置、角度、速度都是相对观测坐标系(地面坐标系、北天东坐标系),角速度等相对自身坐标系。
大地坐标系
即 WGS84(WorldGeodeticCoordinateSystem1984) 坐标系
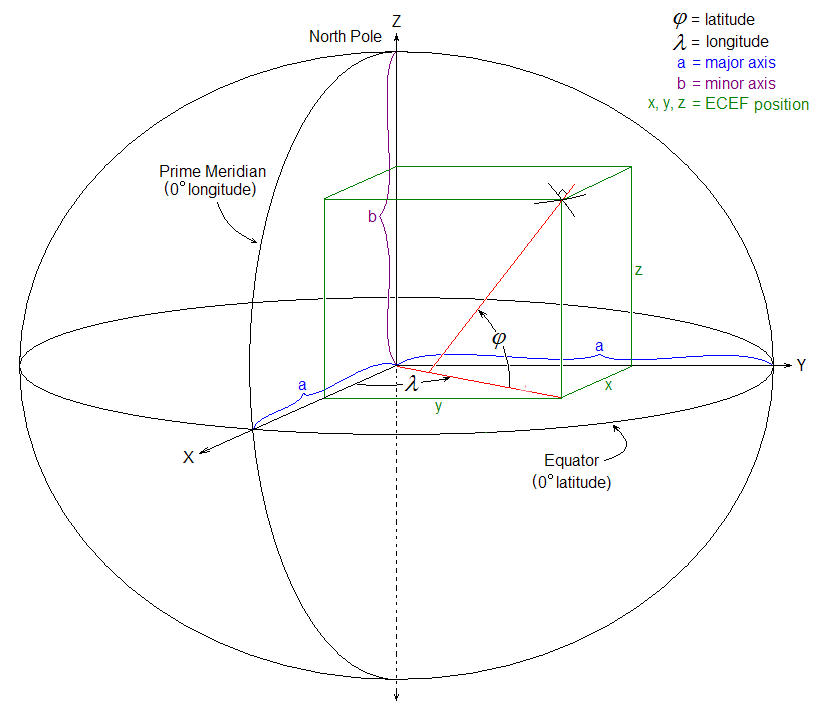
这是为GPS全球定位系统建立的坐标系统。WGS-84坐标系的原点在地球质心,Z轴指向BIH1984.0定义的协定地球极(CTP)方向,X轴指向BIH1984.0的零度子午面和CTP赤道的交点,Y轴和Z、X轴构成右手坐标系。其参数为经度、纬度、海拔高度。
地球中心坐标系
ECEF(Earth-Centered, Earth-Fixed)
ECEF坐标系与地球固联,且随着地球转动。图中O即为坐标原点,位置在地球质心。X轴通过格林尼治线和赤道线的交点,正方向为原点指向交点方向。Z轴通过原点指向北极。Y轴与X、Z轴构成右手坐标系。
下图中可以直观的看出ECEF和WGS84坐标系的区别:
局部切线平面
从定义来分类,局部切线平面可分为基于垂直和水平尺寸定义的平面,其表现在纵坐标为上还是下。纵坐标为上时,称为ENU(东、北、天)坐标系,主要用于地理方面;纵坐标为下时,称为NED(北、东、地)坐标系,特别用于航空航天。
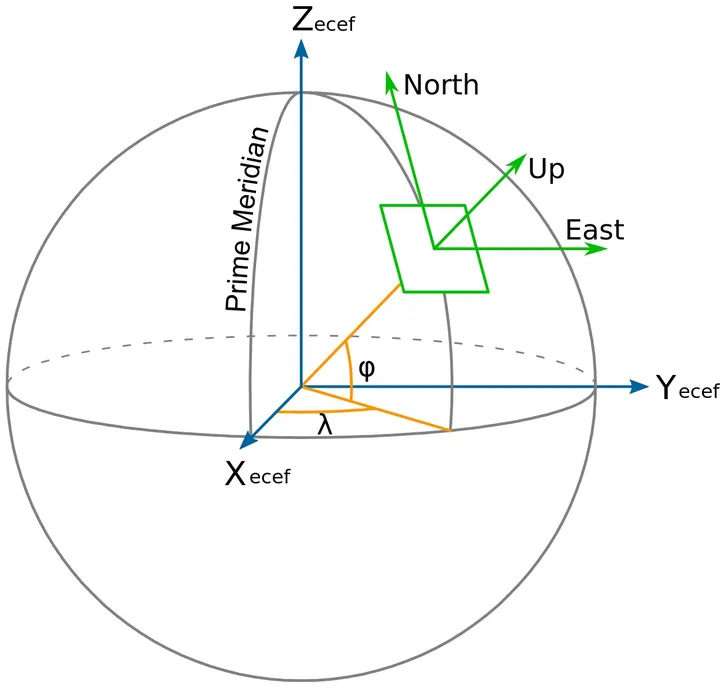
上图为ENU坐标系,该坐标系即为控制装置所在位置的“平面坐标系”,又称为 地理坐标系。
目标坐标系
雷达的重要作用是观测目标,通常目标运动(自身刚体运动)特性在目标坐标系中描述。坐标原点在目标质心处。如下图所示。
地面坐标系
地面坐标系的原点一般为雷达所在位置或火力单元位置,如下图所示。
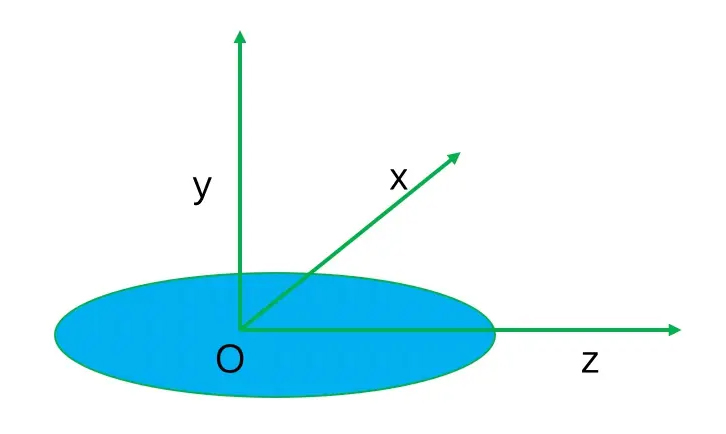
北天东坐标系
即北、天和东分别为坐标轴的X、Y和Z轴,如下图所示。
平台坐标系
若雷达在运动平台上,如飞机、导弹等,平台运动一般在平台坐标系中描述。飞机的姿态角(偏航、俯仰和横滚)是在大地坐标系下定义和描述的。
天线坐标系
天线坐标系原点在平台上的某个位置,通过平台坐标系方位和俯仰(角)旋转得到。若为正前视,则与平台坐标系一致。
坐标转换
目标坐标系到地面坐标系
若目标的姿态角分别为𝜙,𝜃和𝛾分别对应偏航、俯仰和横滚产生的角度,$𝑃_0$为目标在地面坐标系的坐标,则有目标点在地面坐标系中的坐标为
$$
P^{\prime}=R_{x}(\gamma) R_{y}(\theta) R_{z}(\phi) \times P+P_{0}
$$
其中:
地面坐标系到北天东坐标系
由定义可知,此转换相当于沿Y轴旋转90度,再沿Z轴旋转90度,可以得到如下变换:
$$ P^{\prime}=R_{z}\left(90^{\circ}\right) R_{y}\left(90^{\circ}\right) \times P $$其中:
$$ R_{g e}=R_{z}\left(90^{\circ}\right) R_{y}\left(90^{\circ}\right)=\left[\begin{array}{ccc} 0 & 1 & 0 \\ -1 & 0 & 0 \\ 0 & 0 & 1 \end{array}\right]\left[\begin{array}{ccc} 0 & 0 & -1 \\ 0 & 1 & 0 \\ 1 & 0 & 0 \end{array}\right]=\left[\begin{array}{lll} 0 & 1 & 0 \\ 0 & 0 & 1 \\ 1 & 0 & 0 \end{array}\right] $$北天东坐标系到平台坐标系
根据平台的三个姿态角偏航角𝜓、俯仰角𝜃和横滚角𝛾,平台位置为$𝑃_1$,则有:
$$
P^{\prime}=R_{x}(\gamma) R_{z}(\theta) R_{y}(\psi) \times P-P_{1}
$$
其中:
平台坐标系到天线坐标系
设天线与平台坐标系下的俯仰角和方位角分别为𝛼和𝛽,天线中心坐标为$𝑃_2$,则有如下变换
$$
P^{\prime}=R_{y}(\beta) R_{z}(\alpha) \times P-P_{2}
$$
其中:
$$ \begin{array}{l} R_{b a}=R_{y}(\beta) R_{z}(\alpha) \\ =\left[\begin{array}{ccc} \cos \beta & 0 & -\sin \beta \\ 0 & 1 & 0 \\ \sin \beta & 0 & \cos \beta \end{array}\right]\left[\begin{array}{ccc} \cos \alpha & \sin \alpha & 0 \\ -\sin \alpha & \cos \alpha & 0 \\ 0 & 0 & 1 \end{array}\right] \\ =\left[\begin{array}{ccc} \cos \beta \cos \alpha & \cos \beta \sin \alpha & -\sin \beta \\ -\sin \alpha & \cos \alpha & 0 \\ \sin \beta \cos \alpha & \sin \beta \sin \alpha & \cos \beta \end{array}\right] \end{array} $$参考资料
- https://zhuanlan.zhihu.com/p/640911915
- https://blog.csdn.net/yyytucj/article/details/135453949
- https://www.bilibili.com/video/BV1MK411d7RL/?spm_id_from=333.337.search-card.all.click&vd_source=3c53dd019471c050a181597ec42fada7
文章链接:
https://www.zywvvd.com/notes/study/camera-imaging/radar-coordinate-system/coordinates/
“觉得不错的话,给点打赏吧 ୧(๑•̀⌄•́๑)૭”

微信支付

支付宝支付