本文最后更新于:2025年4月30日 下午
在描述路径时经常会使用折线,而折线有时需要做近似的简化,Douglas-Peuker 算法是一种简单快速的路径近似算法,本文介绍原理和 python 实现。
简介
道格拉斯-普克算法(Douglas–Peucker algorithm),亦称为拉默-道格拉斯-普克算法(Ramer–Douglas–Peucker algorithm),这个算法最初由拉默(Urs Ramer)于1972年提出,1973年道格拉斯(David Douglas)和普克(Thomas Peucker)二人又独立于拉默提出了该算法。
在计算机当中,曲线可以用足够多的点来描述,那么如何用尽可能少的点来描述这条曲线呢,这就是该算法要实现的目标,同时因为用来描述曲线的点变少了,也可以认为其对数据进行了压缩,减少了数据量。
算法
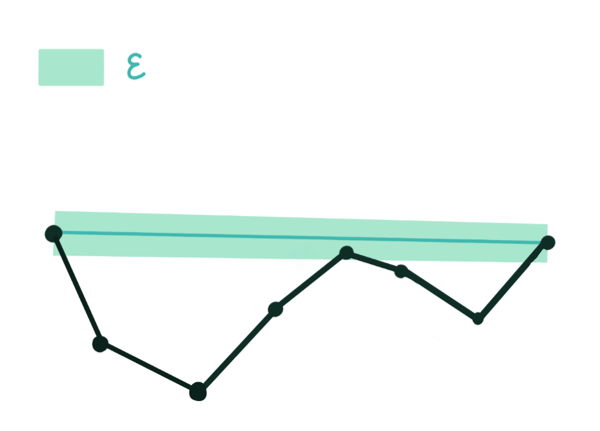
起始曲线是一组有序的点或线,距离维度 ε > 0。
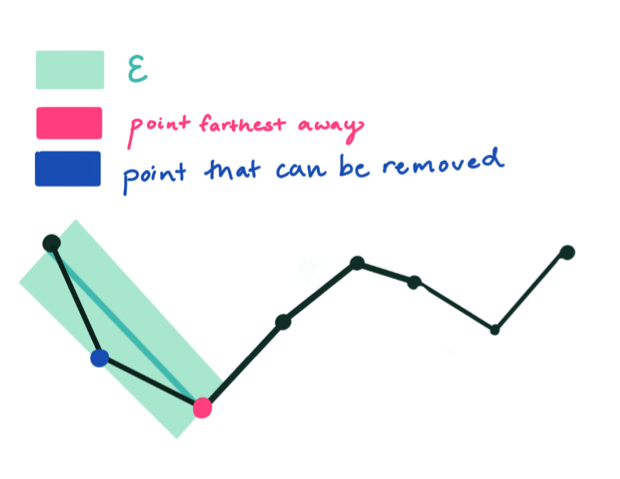
该算法递归划分线。最初,它被赋予了第一点和最后一点之间的所有点。它自动标记要保留的第一点和最后一点。然后它找到离以第一点和最后一点为终点的线段最远的点;这个点显然是曲线上离终点之间的近似线段最远的点。如果这个点离线段的距离比 ε 更近,那么在简化曲线不比 ε 差的情况下,可以舍弃任何当前没有标记保留的点。
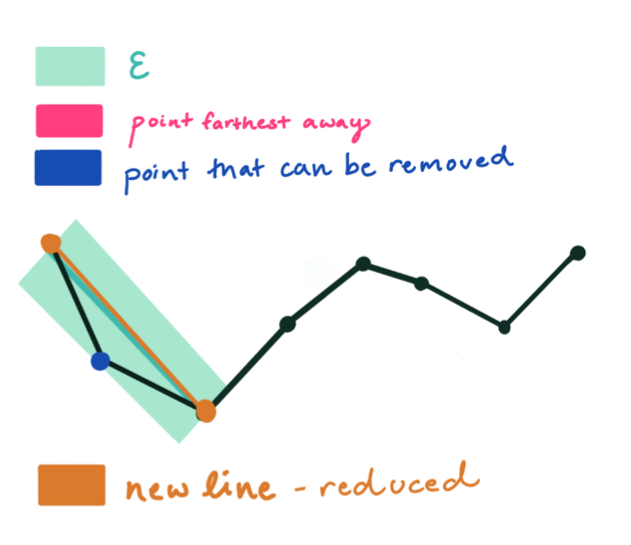
如果离线段最远的点大于近似值 ε,那么该点必须保留。该算法以第一点和最远点递归调用自身,然后以最远点和最后一点调用自身,其中包括最远点被标记为保留。
当递归完成后,可以生成一条新的输出曲线,该曲线由所有且仅由那些被标记为保留的点组成。
算法流程
- 首先明确程序的 输入是一系列的点构成的曲线,输出的是其中一部分点构成的曲线;
- 将曲线首尾AB两点连成一条直线(程序中应当是理论计算出);
- 然后分别计算曲线上各点到这条直线的距离,并取出其中的最远距离与阈值进行比较(该阈值通常人为确定);
- 若是大于阈值,则保留该最大距离对应的点C,此时可以生成两条直线AC、CB,重复步骤三;
- 若是小于阈值,则算法结束。
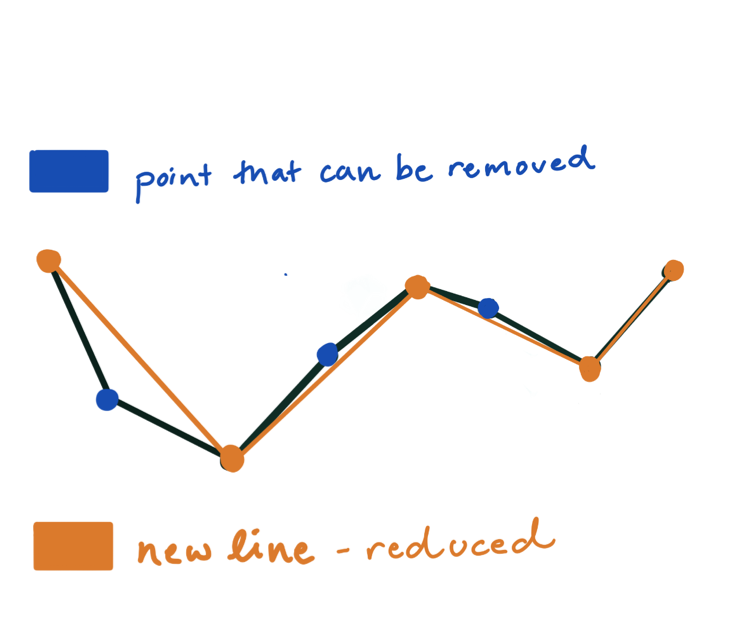
图解流程
-
绿色的宽度就代表阈值
-
红色代表每次算法中最远的点
-
蓝色表示可以被移除的点
-
橙色表示最后生成的曲线

伪代码
1 | |
复杂度
该算法在由 ${\displaystyle n-1}$ 段和 ${\displaystyle n}$ 个顶点组成的折线上运行时的时间由递归 ${\displaystyle T(n)=T(i+1)+T(n-i)+O(n)}$ 给出,其中 ${\displaystyle i\in {1,\ldots ,n-2}} $ 是伪代码中的索引值。在最坏的情况下,每次递归调用时,${\displaystyle i=1}$ 或 ${\displaystyle i=n-2}$,该算法的运行时间为 ${\displaystyle \Theta (n^{2})}$。在最好的情况下,在每次递归调用时,${\displaystyle i=\lfloor n/2\rfloor }$ 或 ${\displaystyle i=\lceil n/2\rceil }$,在这种情况下,运行时间具有 ${\displaystyle O(n\log n)}$ 的众所周知的解(通过分治法的主定理)。
OpenCV 实现
在OpenCV Python中,cv.approxPolyDP是一个用于多边形逼近的函数。它使用Douglas-Peucker算法来减少多边形的点数。
该函数需要两个参数:输入多边形和一个表示逼近精度的参数。输入多边形是一个由点组成的数组,而逼近精度是一个用于控制轮廓近似的精度参数。
测试图像:
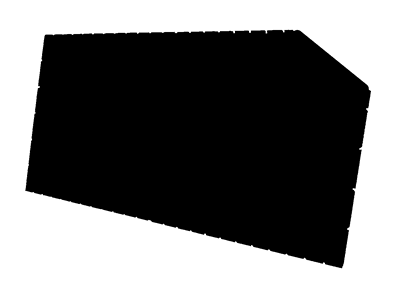
1 | |
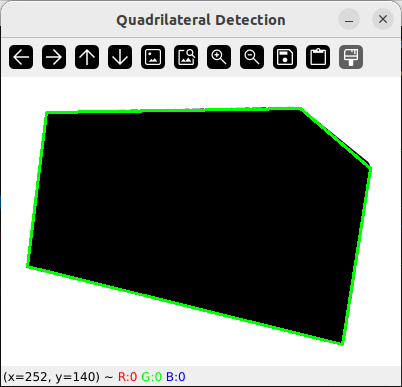
运行效果:
参考资料
- https://bend1031.github.io/2021/07/21/道格拉斯普克(Douglas-Peuker)算法及python实现/
- https://malagis.com/gis-algorithm-douglas-peuker-algorithm-principle-illustration.html
- https://zh.wikipedia.org/zh-hans/道格拉斯-普克算法
- https://www.jb51.net/python/31461134j.htm
文章链接:
https://www.zywvvd.com/notes/study/algorithm/points/douglas-peuker-alg/douglas-peuker-alg/
“觉得不错的话,给点打赏吧 ୧(๑•̀⌄•́๑)૭”

微信支付

支付宝支付