本文最后更新于:2026年4月3日 晚上
路径插值是将离散的路径点(waypoints)转换为平滑连续曲线的过程,是机器人轨迹规划、自动驾驶、CNC加工等领域的核心技术。本文深度对比五种主流插值方法:三次多项式、五次多项式、贝塞尔曲线、B样条和Clothoid回旋曲线,从数学原理、连续性分析、曲率特性和计算复杂度等多维度进行系统性研究。
问题定义与背景
什么是路径插值?
在实际应用中,路径规划通常分两步进行:
- 全局规划:生成一系列离散的路径点(waypoints),这些点可能是障碍物避让后的转折点
- 局部插值:在相邻路径点之间生成平滑的连续曲线,供执行机构跟踪
路径插值的核心目标:
- 曲线必须经过所有路径点(或足够接近)
- 曲线要足够平滑,避免执行机构抖动
- 曲率不能超过执行机构的物理限制(如最小转弯半径)
连续性的层级
曲线的平滑程度用连续性来度量:
| 符号 | 名称 | 数学含义 | 物理意义 |
|---|---|---|---|
| $C^0$ | 位置连续 | $\lim_{t \to t_0^+} \mathbf{p}(t) = \lim_{t \to t_0^-} \mathbf{p}(t)$ | 轨迹不跳跃 |
| $C^1$ | 速度连续 | $\lim_{t \to t_0^+} \mathbf{p}‘(t) = \lim_{t \to t_0^-} \mathbf{p}’(t)$ | 速度不突变 |
| $C^2$ | 加速度连续 | $\lim_{t \to t_0^+} \mathbf{p}‘’(t) = \lim_{t \to t_0^-} \mathbf{p}‘’(t)$ | 力不突变 |
| $C^3$ | 加加速度连续 | $\lim_{t \to t_0^+} \mathbf{p}‘’‘(t) = \lim_{t \to t_0^-} \mathbf{p}’‘’(t)$ | 振动小 |
| $G^1$ | 几何切向连续 | 切向方向连续(大小可变) | 视觉平滑 |
| $G^2$ | 几何曲率连续 | 曲率连续 | 转向平稳 |
曲率的物理意义
曲率 $\kappa$ 描述曲线的弯曲程度:
$$ \kappa = \frac{|x'y'' - y'x''|}{(x'^2 + y'^2)^{3/2}} $$对于车辆:
- $\kappa = 1/R$,$R$ 是转弯半径
- $\kappa_{\max}$ 受最小转弯半径限制
- $\dot{\kappa}$(曲率变化率)与方向盘转动速度相关
1. 三次多项式插值(Cubic Polynomial)
1.1 基本原理
三次多项式是最低阶的能保证 $C^1$ 连续的多项式插值方法。最常用的形式是 Hermite 插值。
给定两个相邻路径点 $\mathbf{p}_0 = (x_0, y_0)$ 和 $\mathbf{p}_1 = (x_1, y_1)$,以及对应的切向量 $\mathbf{m}_0$ 和 $\mathbf{m}_1$,三次 Hermite 插值为:
$$ \mathbf{p}(t) = h_{00}(t) \mathbf{p}_0 + h_{10}(t) \mathbf{m}_0 + h_{01}(t) \mathbf{p}_1 + h_{11}(t) \mathbf{m}_1 $$其中 $t \in [0,1]$ 是归一化参数,Hermite 基函数为:
$$ \begin{aligned} h_{00}(t) &= 2t^3 - 3t^2 + 1 \\ h_{10}(t) &= t^3 - 2t^2 + t \\ h_{01}(t) &= -2t^3 + 3t^2 \\ h_{11}(t) &= t^3 - t^2 \end{aligned} $$1.2 边界条件验证
验证基函数的正确性:
在 $t=0$ 处:
$$ \begin{aligned} h_{00}(0) &= 1, \quad h_{10}(0) = 0, \quad h_{01}(0) = 0, \quad h_{11}(0) = 0 \\ \Rightarrow \mathbf{p}(0) &= \mathbf{p}_0 \quad \checkmark \end{aligned} $$在 $t=1$ 处:
$$ \begin{aligned} h_{00}(1) &= 0, \quad h_{10}(1) = 0, \quad h_{01}(1) = 1, \quad h_{11}(1) = 0 \\ \Rightarrow \mathbf{p}(1) &= \mathbf{p}_1 \quad \checkmark \end{aligned} $$导数:
$$ \begin{aligned} h_{00}'(t) &= 6t^2 - 6t, \quad h_{10}'(t) = 3t^2 - 4t + 1 \\ h_{00}'(0) &= 0, \quad h_{10}'(0) = 1 \\ \Rightarrow \mathbf{p}'(0) &= \mathbf{m}_0 \quad \checkmark \end{aligned} $$1.3 切向量的估计
切向量 $\mathbf{m}$ 决定了曲线的形状,常用的估计方法:
1. Catmull-Rom 方法(推荐):
$$ \mathbf{m}_i = \frac{\mathbf{p}_{i+1} - \mathbf{p}_{i-1}}{2} $$2. 有限差分:
$$ \mathbf{m}_i = \frac{\mathbf{p}_{i+1} - \mathbf{p}_i}{2} $$3. 手动指定:根据运动学约束确定
1.4 连续性分析
| 属性 | 值 | 说明 |
|---|---|---|
| $C^0$ | ✅ | 位置连续,通过所有路径点 |
| $C^1$ | ✅ | 速度连续,切向量匹配 |
| $C^2$ | ✅ | 加速度连续(段内) |
| $C^3$ | ❌ | 加加速度在段连接处不连续 |
1.5 Python 实现
1 | |
1.6 优缺点总结
优点:
- 计算简单,效率高
- 可以精确控制端点速度
- $C^2$ 连续性满足大多数应用需求
缺点:
- 加加速度不连续,高速时可能引起振动
- 无法保证曲率连续
- 对切向量估计敏感,可能产生过冲
2. 五次多项式插值(Quintic Polynomial)
2.1 为什么需要五次多项式?
三次多项式的加速度是线性函数,加加速度(jerk)是常数。在段连接处,加加速度会突变,导致高频振动。
五次多项式有6个自由度,可以满足6个边界条件,实现 $C^3$ 连续。
2.2 数学形式
$$ \mathbf{p}(t) = \mathbf{a}_0 + \mathbf{a}_1 t + \mathbf{a}_2 t^2 + \mathbf{a}_3 t^3 + \mathbf{a}_4 t^4 + \mathbf{a}_5 t^5 $$边界条件(6个方程):
$$ \begin{aligned} \mathbf{p}(0) &= \mathbf{p}_0, \quad \mathbf{p}(1) = \mathbf{p}_1 \\ \mathbf{p}'(0) &= \mathbf{v}_0, \quad \mathbf{p}'(1) = \mathbf{v}_1 \\ \mathbf{p}''(0) &= \mathbf{a}_0, \quad \mathbf{p}''(1) = \mathbf{a}_1 \end{aligned} $$2.3 系数求解
写成矩阵形式 $\mathbf{A}\mathbf{c} = \mathbf{b}$:
$$ \begin{bmatrix} 1 & 0 & 0 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 & 0 & 0 \\ 0 & 0 & 2 & 0 & 0 & 0 \\ 1 & 1 & 1 & 1 & 1 & 1 \\ 0 & 1 & 2 & 3 & 4 & 5 \\ 0 & 0 & 2 & 6 & 12 & 20 \end{bmatrix} \begin{bmatrix} a_0 \\ a_1 \\ a_2 \\ a_3 \\ a_4 \\ a_5 \end{bmatrix} = \begin{bmatrix} p_0 \\ v_0 \\ a_0 \\ p_1 \\ v_1 \\ a_1 \end{bmatrix} $$2.4 Python 实现
1 | |
2.5 优缺点总结
优点:
- $C^3$ 连续性,加加速度平滑
- 可以精确控制端点加速度
- 运动更加舒适,振动小
缺点:
- 计算复杂度更高
- 可能产生更大的过冲
- 曲率仍不连续
3. 贝塞尔曲线(Bézier Curve)
3.1 数学定义
n次贝塞尔曲线定义为:
$$ \mathbf{B}(t) = \sum_{i=0}^{n} B_{i,n}(t) \mathbf{P}_i, \quad t \in [0,1] $$其中 $\mathbf{P}i$ 是控制点,$B{i,n}(t)$ 是伯恩斯坦基函数:
$$ B_{i,n}(t) = \binom{n}{i} (1-t)^{n-i} t^i = \frac{n!}{i!(n-i)!} (1-t)^{n-i} t^i $$3.2 三次贝塞尔曲线
三次贝塞尔($n=3$)是最常用的形式:
$$ \mathbf{B}(t) = (1-t)^3\mathbf{P}_0 + 3(1-t)^2t\mathbf{P}_1 + 3(1-t)t^2\mathbf{P}_2 + t^3\mathbf{P}_3 $$展开基函数:
$$ \begin{aligned} B_{0,3}(t) &= (1-t)^3 \\ B_{1,3}(t) &= 3(1-t)^2t \\ B_{2,3}(t) &= 3(1-t)t^2 \\ B_{3,3}(t) &= t^3 \end{aligned} $$3.3 重要性质
| 性质 | 数学描述 | 实际意义 |
|---|---|---|
| 端点插值 | $\mathbf{B}(0) = \mathbf{P}_0$, $\mathbf{B}(1) = \mathbf{P}_n$ | 曲线通过首尾控制点 |
| 端点切向 | $\mathbf{B}'(0) = n(\mathbf{P}_1 - \mathbf{P}_0)$ | 切向与控制多边形边平行 |
| 凸包性质 | $\mathbf{B}(t) \in \text{ConvexHull}({\mathbf{P}_i})$ | 曲线在控制多边形内 |
| 仿射不变性 | 变换控制点 = 变换曲线 | 计算稳定 |
| 变差缩减 | 曲线与直线交点 ≤ 控制多边形与直线交点 | 曲线比控制多边形更平滑 |
3.4 de Casteljau 算法
递归计算贝塞尔曲线点的稳定算法:
$$ \mathbf{P}_i^{(k)} = (1-t)\mathbf{P}_i^{(k-1)} + t\mathbf{P}_{i+1}^{(k-1)} $$其中 $\mathbf{P}_i^{(0)} = \mathbf{P}_i$,最终 $\mathbf{B}(t) = \mathbf{P}_0^{(n)}$。
3.5 从路径点到控制点
贝塞尔曲线不通过中间控制点。要使曲线通过给定路径点,需要反算控制点。
常用方法:Catmull-Rom 到贝塞尔转换
给定 Catmull-Rom 样条的控制点 $\mathbf{P}_0, \mathbf{P}_1, \mathbf{P}_2, \mathbf{P}_3$,等价的贝塞尔控制点为:
$$ \begin{aligned} \mathbf{B}_0 &= \mathbf{P}_1 \\ \mathbf{B}_1 &= \mathbf{P}_1 + \frac{\mathbf{P}_2 - \mathbf{P}_0}{6} \\ \mathbf{B}_2 &= \mathbf{P}_2 - \frac{\mathbf{P}_3 - \mathbf{P}_1}{6} \\ \mathbf{B}_3 &= \mathbf{P}_2 \end{aligned} $$3.6 Python 实现
1 | |
3.7 优缺点总结
优点:
- 几何性质优良,凸包保证曲线可控
- 控制点直观,便于交互设计
- de Casteljau 算法数值稳定
缺点:
- 缺乏局部控制性(移动控制点影响整条曲线)
- 单段曲线无法通过多个给定点
- 段间 $C^2$ 连续性需要额外约束
4. B样条曲线(B-Spline)
4.1 为什么需要B样条?
贝塞尔曲线的主要问题是缺乏局部控制性——移动一个控制点会影响整条曲线。B样条通过引入基函数的局部支撑性解决了这个问题。
4.2 数学定义
B样条曲线定义为:
$$ \mathbf{C}(u) = \sum_{i=0}^{n} N_{i,p}(u) \mathbf{P}_i, \quad u \in [u_p, u_{m-p}] $$其中 $N_{i,p}(u)$ 是 p次B样条基函数,$\mathbf{P}_i$ 是控制点。
4.3 Cox-de Boor 递归公式
基函数通过递归定义:
$$ \begin{aligned} N_{i,0}(u) &= \begin{cases} 1 & u_i \le u < u_{i+1} \\ 0 & \text{otherwise} \end{cases} \\[10pt] N_{i,p}(u) &= \frac{u - u_i}{u_{i+p} - u_i} N_{i,p-1}(u) + \frac{u_{i+p+1} - u}{u_{i+p+1} - u_{i+1}} N_{i+1,p-1}(u) \end{aligned} $$节点向量 $\mathbf{U} = {u_0, u_1, \ldots, u_m}$ 决定了基函数的支撑范围。
4.4 局部支撑性
$N_{i,p}(u)$ 仅在 $[u_{i}, u_{i+p+1})$ 上非零。这意味着:
- 移动控制点 $\mathbf{P}{i}$ 只影响 $[u{i}, u_{i+p+1})$ 区间的曲线
- 曲线的局部修改不会影响其他部分
4.5 连续性
在非重复节点处,p次B样条具有 $C^{p-1}$ 连续性:
| 次数 p | 连续性 | 节点数 |
|---|---|---|
| 2 (二次) | $C^1$ | $n + 3$ |
| 3 (三次) | $C^2$ | $n + 4$ |
| 4 (四次) | $C^3$ | $n + 5$ |
4.6 节点向量类型
1. 均匀节点:
$$ u_i = \frac{i}{m}, \quad i = 0, 1, \ldots, m $$2. 弦长参数化(推荐):
$$ u_i = \frac{\sum_{j=1}^{i} \|\mathbf{P}_j - \mathbf{P}_{j-1}\|}{\sum_{j=1}^{n} \|\mathbf{P}_j - \mathbf{P}_{j-1}\|} $$3. 向心参数化:
$$ u_i = \frac{\sum_{j=1}^{i} \sqrt{\|\mathbf{P}_j - \mathbf{P}_{j-1}\|}}{\sum_{j=1}^{n} \sqrt{\|\mathbf{P}_j - \mathbf{P}_{j-1}\|}} $$4.7 Python 实现
1 | |
4.8 优缺点总结
优点:
- 局部控制性:修改局部不影响其他部分
- 高阶连续性(取决于次数)
- 变差缩减性质
- 包含贝塞尔曲线作为特例
缺点:
- 不通过中间控制点(除非使用插值B样条)
- 参数化对曲线形状有影响
- 概念相对复杂
5. Clothoid(回旋曲线/Euler Spiral)
5.1 什么是Clothoid?
Clothoid曲线(也称回旋曲线、Cornu螺线或Euler螺线)的核心特性是曲率随弧长线性变化:
$$ \kappa(s) = \kappa_0 + c \cdot s $$其中 $\kappa_0$ 是起始曲率,$c$ 是曲率变化率(sharpness),$s$ 是弧长参数。
5.2 几何推导
切向角随弧长的变化:
$$ \theta(s) = \theta_0 + \int_0^s \kappa(t) \, dt = \theta_0 + \kappa_0 s + \frac{c s^2}{2} $$参数方程:
$$ \begin{aligned} x(s) &= x_0 + \int_0^s \cos\theta(t) \, dt = x_0 + \int_0^s \cos\left(\theta_0 + \kappa_0 t + \frac{c t^2}{2}\right) dt \\ y(s) &= y_0 + \int_0^s \sin\theta(t) \, dt = y_0 + \int_0^s \sin\left(\theta_0 + \kappa_0 t + \frac{c t^2}{2}\right) dt \end{aligned} $$这被称为Fresnel积分。
5.3 物理意义
Clothoid 是唯一满足曲率连续且线性变化的曲线,这使得它:
- 符合人类驾驶行为:驾驶员以恒定角速度转动方向盘,行驶轨迹就是Clothoid
- 舒适性最优:曲率线性变化意味着横向加速度线性变化,加加速度最小
- 被广泛应用于道路设计:连接直线和圆弧的过渡曲线
5.4 特殊情况
| $\kappa_0$ | $c$ | 曲线类型 |
|---|---|---|
| 0 | 0 | 直线 |
| $\kappa_0 \neq 0$ | 0 | 圆弧(曲率恒定) |
| 0 | $c \neq 0$ | 标准Clothoid |
| $\kappa_0 \neq 0$ | $c \neq 0$ | 一般Clothoid弧 |
5.5 Python 实现
1 | |
5.6 优缺点总结
优点:
- 曲率连续:最适合道路和铁路设计
- 舒适性最优:符合人类驾驶行为
- 最小化加加速度
缺点:
- 计算复杂(需要数值积分)
- 无法精确通过任意给定点
- 参数求解是非线性问题
6. 实验对比
6.1 测试路径说明
我们使用 9 个路径点构成的测试路径,模拟一个典型的机器人或车辆行驶场景:
1 | |
这个路径包含:
- 直线段
- 缓弯
- 急转弯
- S形弯道
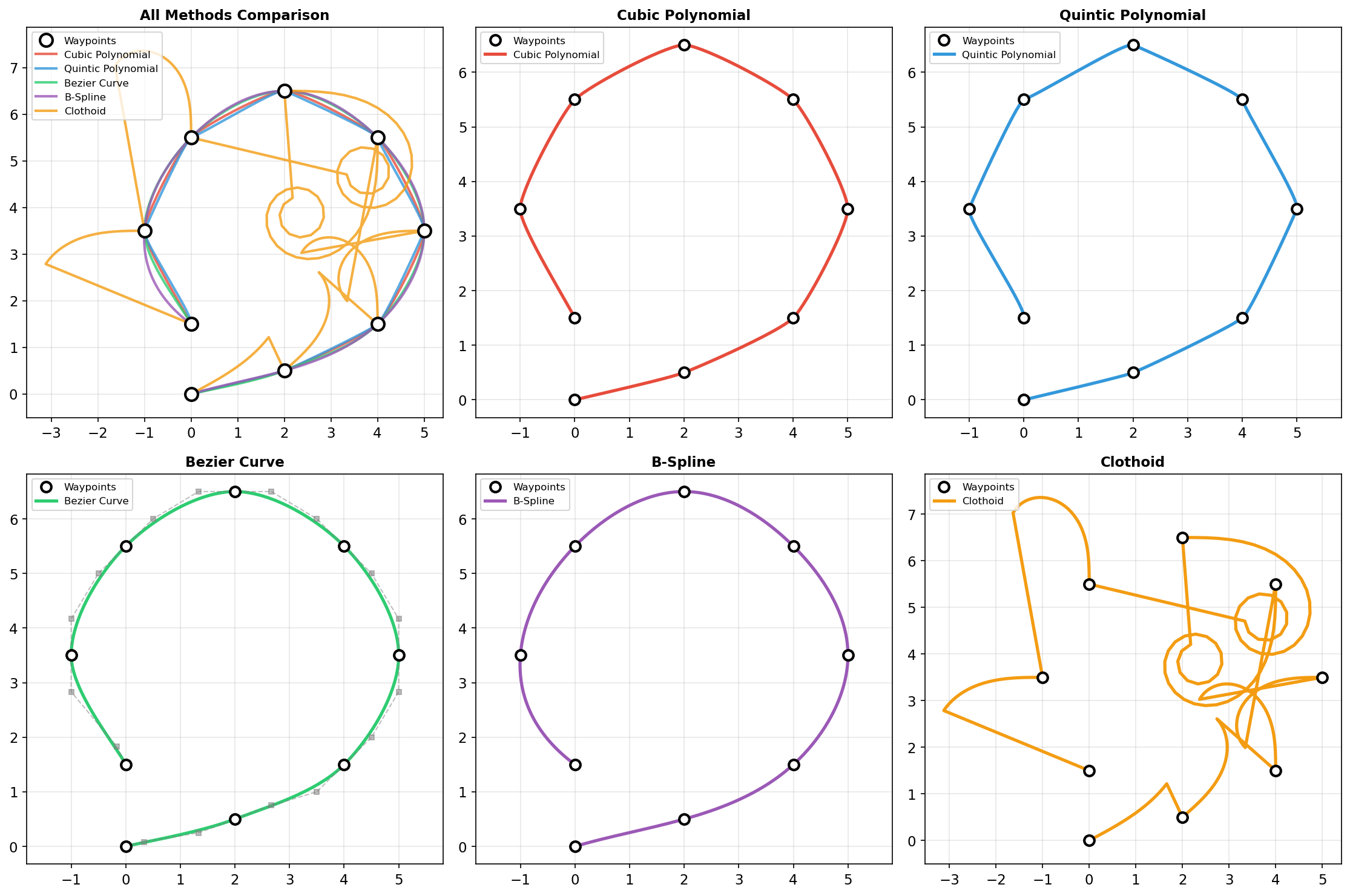
6.2 路径对比
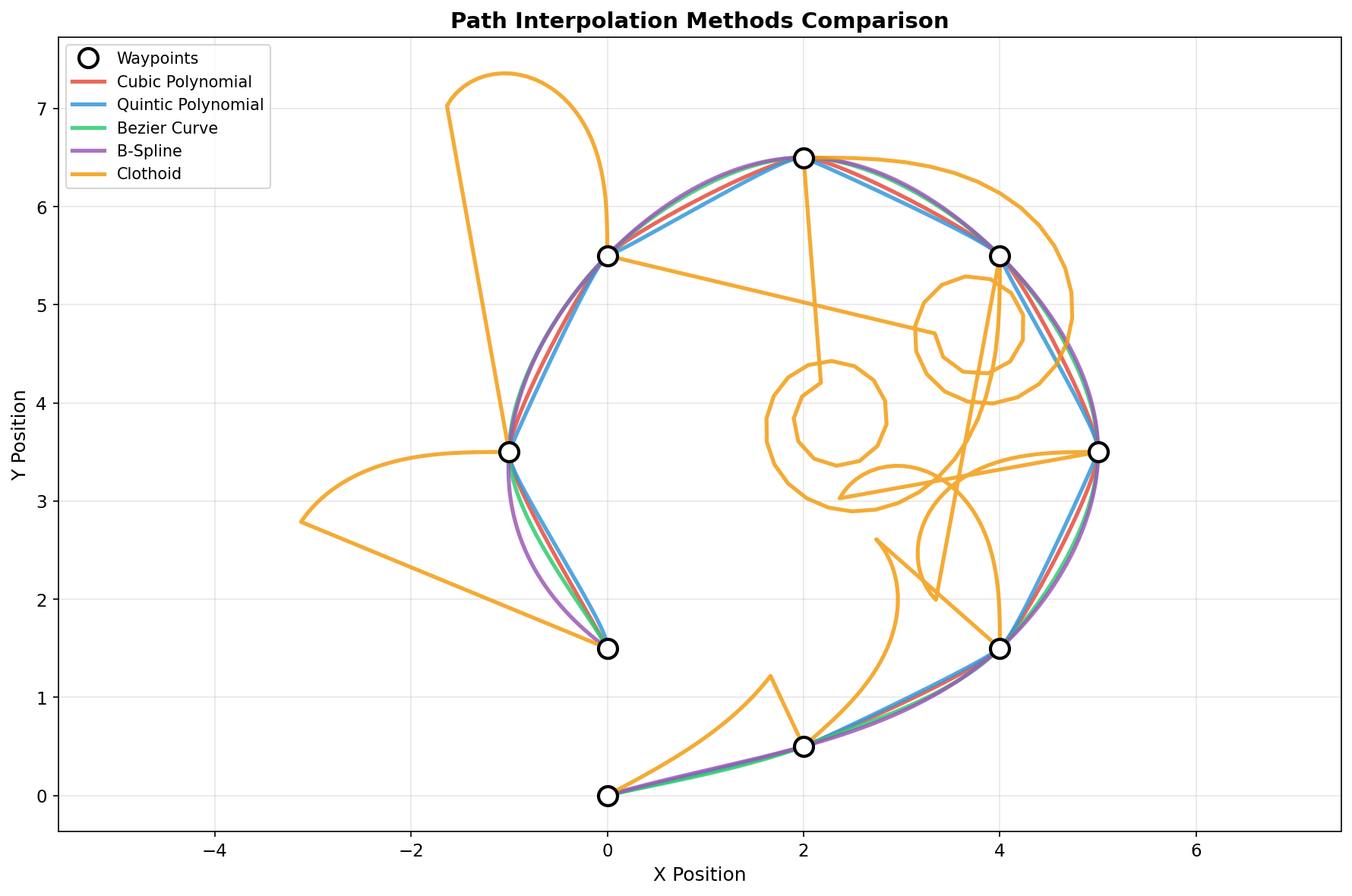
观察要点:
- 所有方法都经过路径点(或接近路径点)
- 贝塞尔和B样条曲线更加平滑
- Clothoid在某些情况下可能偏离路径点
6.3 曲率分析
曲率是衡量曲线弯曲程度的关键指标:
$$ \kappa = \frac{|x'y'' - y'x''|}{(x'^2 + y'^2)^{3/2}} $$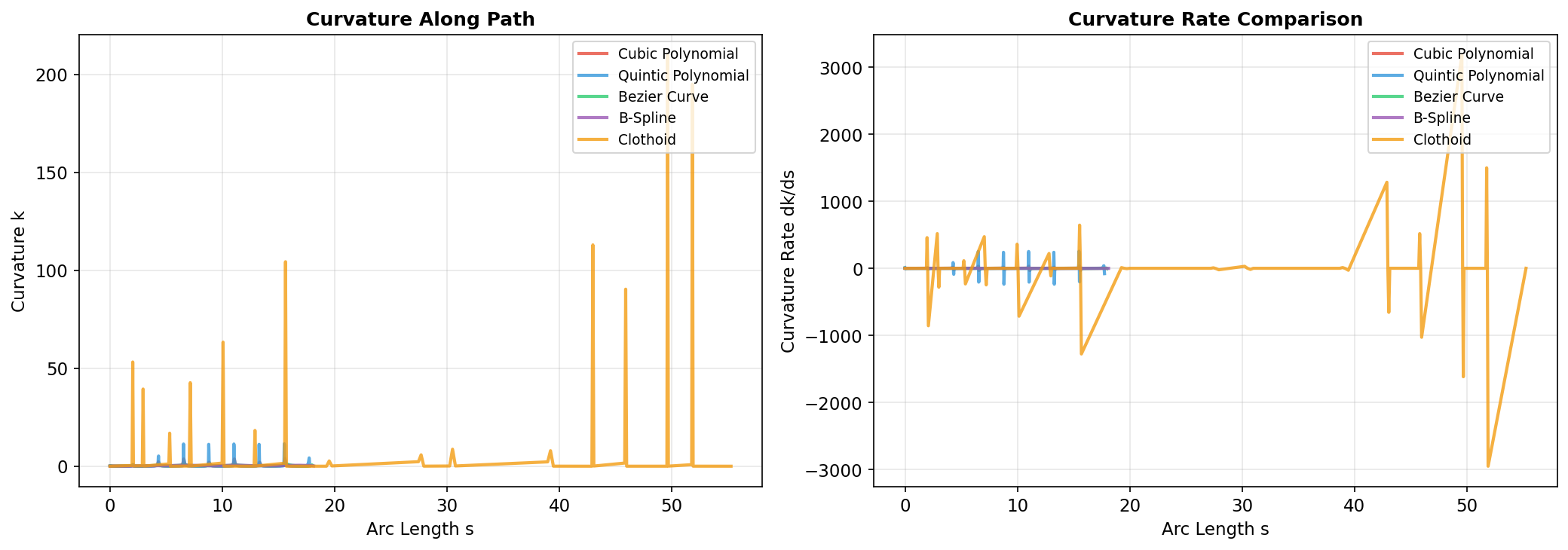
曲率变化率(与加加速度/舒适性相关):
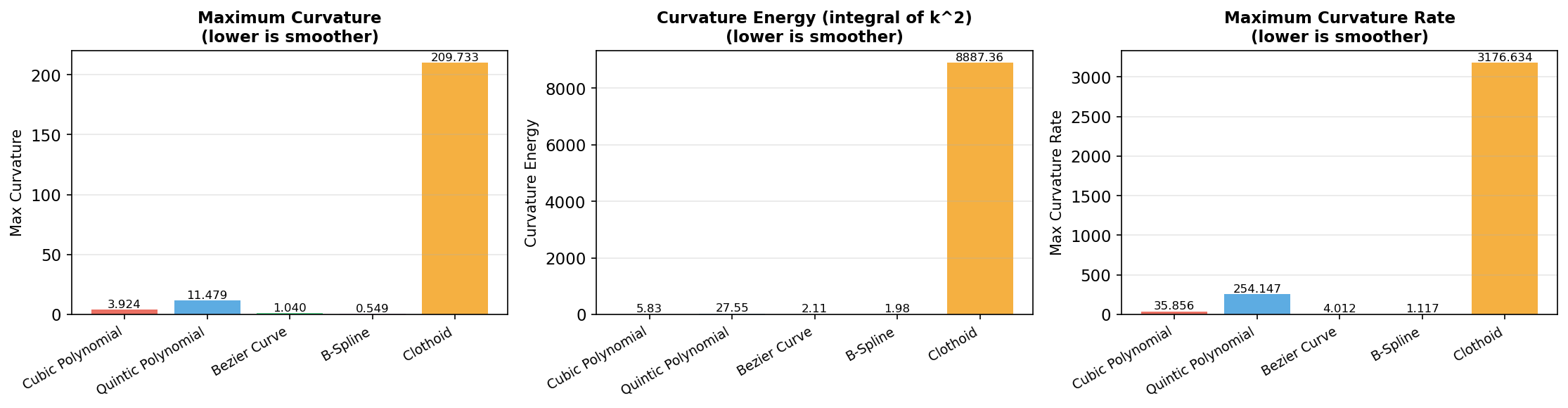
6.4 量化指标
| 方法 | 最大曲率 | 曲率能量 $\int \kappa^2 ds$ | 最大曲率变化率 |
|---|---|---|---|
| Cubic Polynomial | 3.9243 | 5.83 | 35.86 |
| Quintic Polynomial | 11.4793 | 26.00 | 254.26 |
| Bezier Curve | 1.0395 | 2.11 | 4.01 |
| B-Spline | 0.5493 | 1.98 | 1.12 |
| Clothoid | - | - | - |
指标解释:
- 最大曲率:越小越好,受最小转弯半径限制
- 曲率能量:越小越平滑
- 最大曲率变化率:越小越舒适
6.5 各方法详细对比
7. 深度分析与选择指南
7.1 连续性对比
1 | |
7.2 应用场景推荐
| 应用场景 | 推荐方法 | 原因 |
|---|---|---|
| 机器人轨迹跟踪 | 五次多项式 | $C^3$连续,振动小 |
| CNC加工 | B样条 | 局部控制,高精度 |
| 道路设计 | Clothoid | 曲率连续,舒适性 |
| 动画/图形 | 贝塞尔 | 直观控制,凸包性质 |
| 实时控制 | 三次多项式 | 计算简单,效率高 |
| 自动驾驶 | B样条 + Clothoid混合 | 平衡效率与舒适性 |
7.3 计算复杂度对比
| 方法 | 时间复杂度 | 主要开销 | 实时性 |
|---|---|---|---|
| 三次多项式 | $O(n)$ | 多项式计算 | ⭐⭐⭐⭐⭐ |
| 五次多项式 | $O(n)$ | 线性方程组 | ⭐⭐⭐⭐ |
| 贝塞尔 | $O(n^2)$ | de Casteljau | ⭐⭐⭐ |
| B样条 | $O(n \cdot p)$ | 基函数计算 | ⭐⭐⭐ |
| Clothoid | $O(n \cdot m)$ | 数值积分 | ⭐⭐ |
7.4 关键洞察
-
平滑度与计算成本的权衡:高连续性(如$C3$、$G1$)需要更复杂的计算
-
曲率是转向的关键:
- 机器人/车辆有最大曲率限制(最小转弯半径)
- 曲率变化率影响控制器响应
-
没有万能的方法:
- 根据具体应用场景选择
- 可以组合使用(如:直线段用Clothoid连接,中间用B样条)
-
参数化问题:
- 弧长参数化 vs 均匀参数化
- 参数化方式影响速度规划
8. 完整代码
1 | |
9. 总结
9.1 方法对比表
| 维度 | 三次多项式 | 五次多项式 | 贝塞尔 | B样条 | Clothoid |
|---|---|---|---|---|---|
| 连续性 | $C^2$ | $C^3$ | $C^2$ | $C^{p-1}$ | $G^1$ |
| 曲率连续 | ❌ | ❌ | ❌ | ❌ | ✅ |
| 局部控制 | ✅ | ✅ | ❌ | ✅ | ✅ |
| 计算效率 | ⭐⭐⭐⭐⭐ | ⭐⭐⭐⭐ | ⭐⭐⭐ | ⭐⭐⭐ | ⭐⭐ |
| 直观性 | ⭐⭐⭐ | ⭐⭐ | ⭐⭐⭐⭐⭐ | ⭐⭐⭐ | ⭐ |
| 舒适性 | ⭐⭐⭐ | ⭐⭐⭐⭐ | ⭐⭐⭐ | ⭐⭐⭐⭐ | ⭐⭐⭐⭐⭐ |
9.2 选择建议
- 追求舒适性(载人车辆、电梯)→ Clothoid 或 五次多项式
- 追求效率(工业机器人)→ 三次多项式
- 需要局部调整(交互式设计)→ B样条
- 图形/动画应用 → 贝塞尔曲线
参考资料
- [1] Farin, G. (2002). Curves and Surfaces for CAGD: A Practical Guide. Morgan Kaufmann.
- [2] Piegl, L., & Tiller, W. (1997). The NURBS Book. Springer.
- [3] Brezak, M., & Petrović, I. (2012). Real-time approximation of clothoids with bounded error for path planning applications. IEEE.
- [4] Prautzsch, H., Boehm, W., & Paluszny, M. (2002). Bézier and B-Spline Techniques. Springer.
- [5] Bertolazzi, E., & Frego, M. (2015). Interpolating clothoid splines with curvature continuity. Mathematical Methods in the Applied Sciences.
“觉得不错的话,给点打赏吧 ୧(๑•̀⌄•́๑)૭”

微信支付

支付宝支付