DeepSeek 模型本地化部署 Deepseek 是近期杭州深度求索人工智能基础技术研究有限公司发布的国产大语言模型, 在推理速度上相较历史模型有了大幅提升。本文记录本地部署 DeepSeek 模型的流程。 2025-02-07 Large_Language_Model #Large_Language_Model
Python logging 日志级别影响 mongodb 日志输出 Python 的 logging 模块的日志级别会影响 mongodb 的 debug 输出结果,本文记录相关内容。 2025-02-05 Coding > Python #Coding #Python
Git 文件模式 mode Git 中的 “mode” 指的是文件的模式位,它决定了文件是常规文件、目录、符号链接,以及文件的权限设置(读、写、执行权限),本记录相关内容。 2025-01-22 Tools > Git #Tools #Git
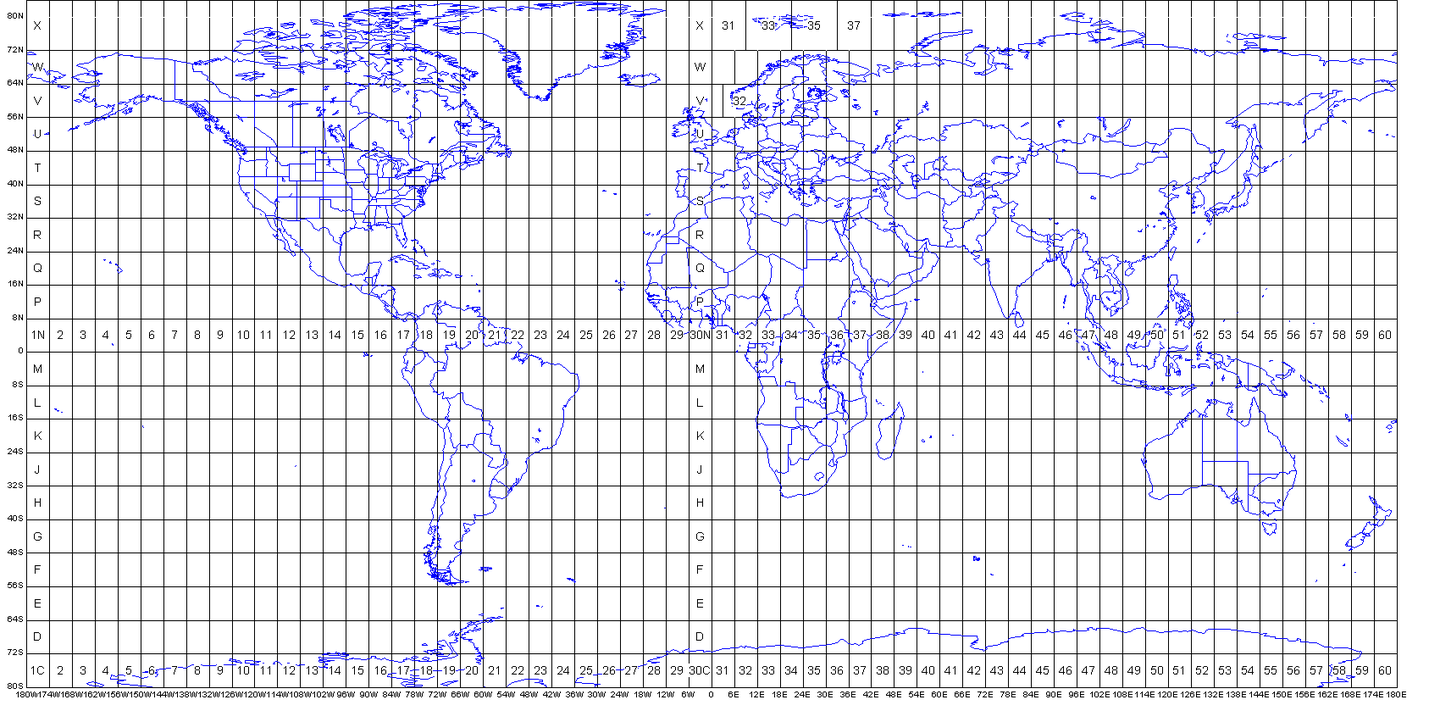
Python rasterio 库创建标准地理信息 TIF 图像 Python 可以使用 rasterio 库创建 TIF 文件,本文记录相关信息。 2025-01-17 Image_Processing #Image_Processing
NodePPT build 03000086 错误解决方案 本文记录 nodeppt build / serve 命令错误的解决方案。 2025-01-15 Coding > Node_js #Coding #Node_js