傅里叶级数
- 对周期信号进行分解的方式
- 为直流分量,为使用的正弦波的下标,为幅度
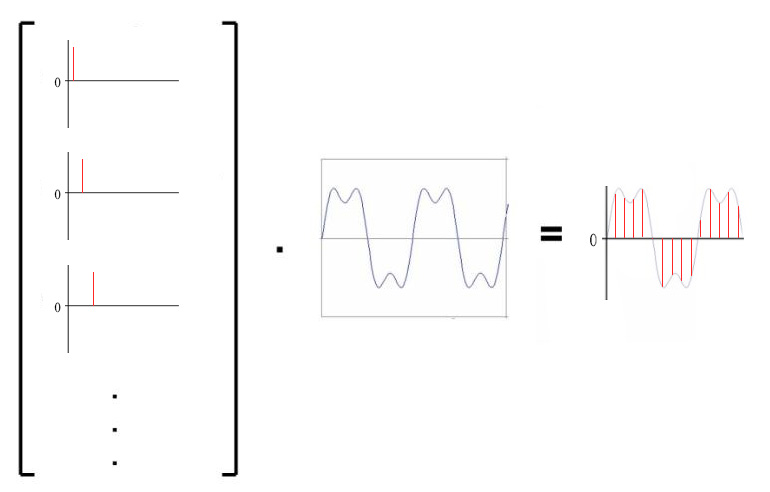
时域信号基
- 对于自然界存在的信号,在时域时可以理解为此信号的基为不同时刻的冲击函数,基是一族冲击激信号
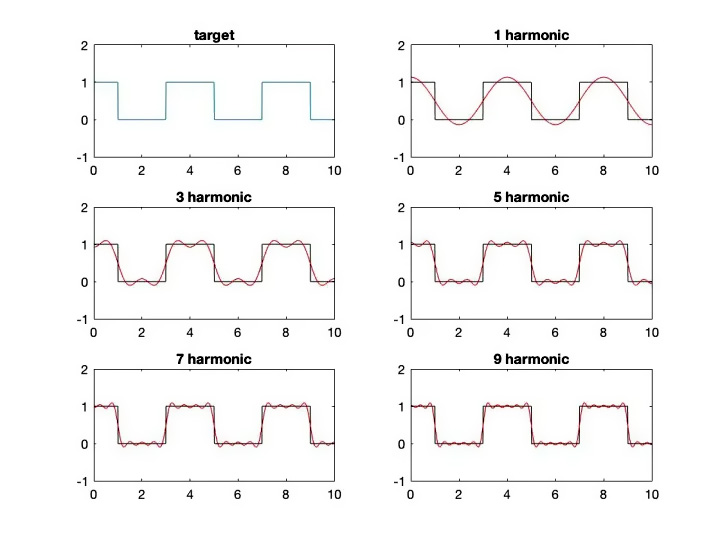
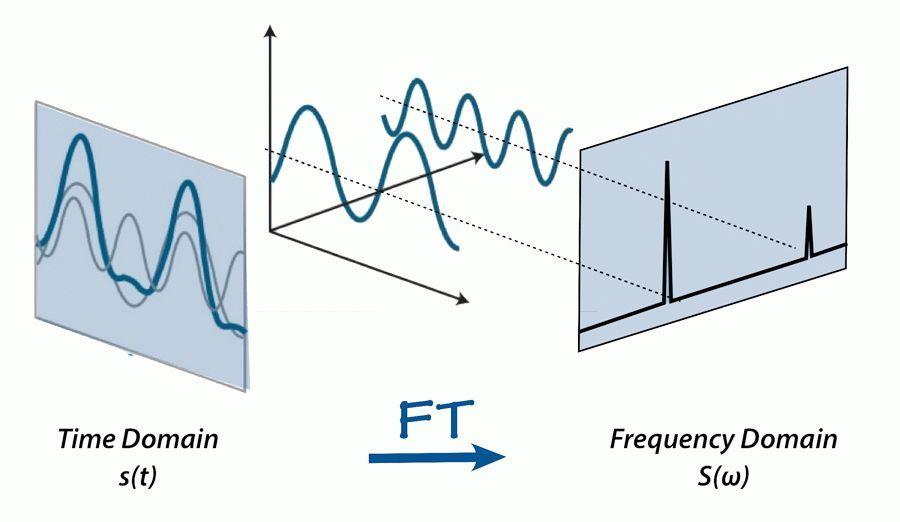
傅立叶变换
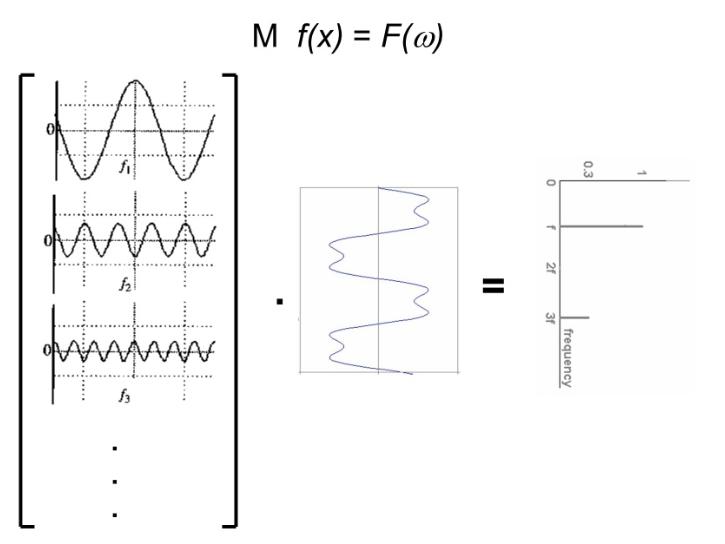
傅立叶变换是一种基于傅里叶级数的分析信号的方法, 用正弦波作为信号的成分。
当选择无限个不同频率不同振幅的正弦、余弦波的集合作为信号的基时, 信号就转换到了频域。
在频域中,基是 ,而且这组基是正交基(基于傅里叶级数)
一维傅里叶变换
- 为时域信号,一维傅里叶变换的定义为:
叫做的象函数,叫做的象原函数。
是的象,是原象。
一维傅里叶变换是将一个一维的信号分解成若干个复指数波。
而由于,所以可以将每一个复指数波都视为是
余弦波正弦波的组合。
一维傅里叶变换中的正弦波表示
- 对于一个正弦波而言,需要三个参数来确定它:
- 频率,幅度,相位φ
- 因此在频域中,一维坐标代表频率,而每个坐标对应的函数值也就是是一个复数,其中它的幅度就是这个频率正弦波的幅度,相位∠F(w)就是φ。
- 右侧展现的是幅度图,在信号处理中用到更多的也是幅度图。
二维傅里叶变换
- 一维信号是一个序列,傅里叶变换将其分解成若干个一维的正弦函数之和。
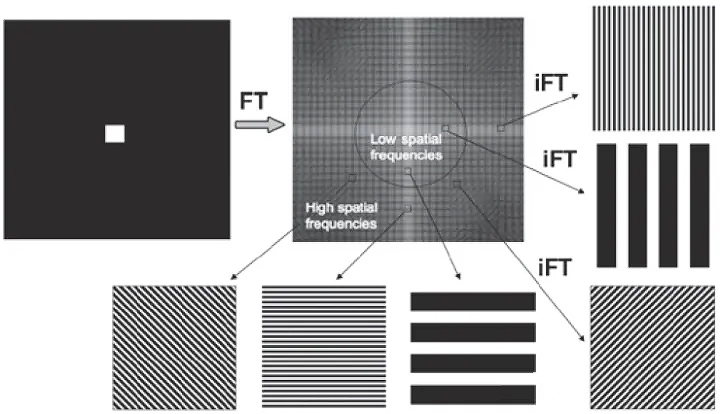
- 二维傅里叶变换将一个图像分解成若干个复平面波之和。
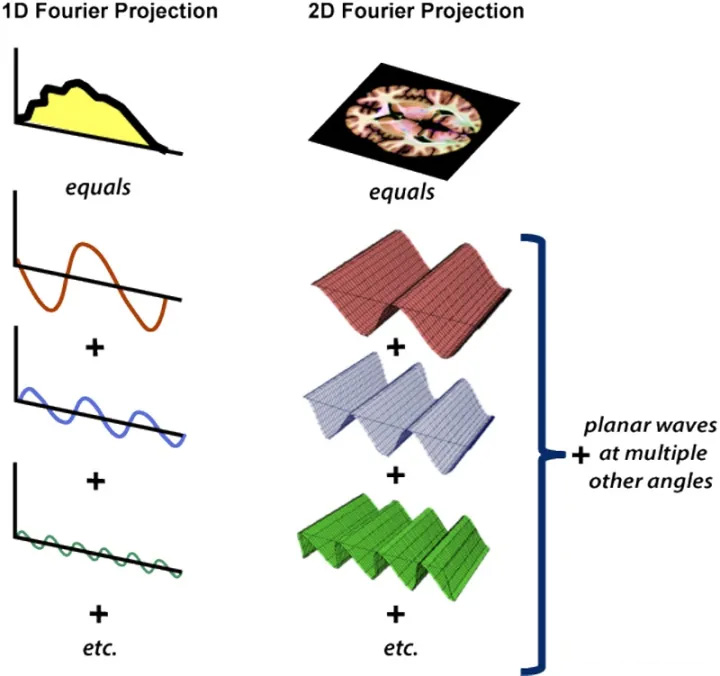
二维傅里叶变换
- 对于正弦平面波,可以这样理解,在一个方向上存在一个正弦函数,在法线方向上将其拉伸。前面 说过三个参数可以确定一个一维的正弦波。哪几个参数可以确定一个二维的正弦平面波呢?
- 答案是 四个,其中三个和一维的情况一样 (频率, 幅度,相位),但是具有相同这些参数的平面波 却可以有不同的方向。
卷积 与 互相关 (概念澄清)
- 神经网络的卷积介绍中经常可以看到这样的示意图,称之为卷积
- 在信号处理中的卷积定义为:
也就是说的二维信号是左右、上下翻转后再平移求向量点积的,与神经网络中表示的卷积概念有一点出入,只是在不同场合的说法不同。
- 这样设计的好处是使得卷积操作拥有了可交换性,即上式可以等价地写作:
循环卷积
- 对于 维数据 ,当利用傅里叶变换计算
互相关/卷积时,输出结果维度仍为 - 那么在时域该卷积是如何 pad 的?

计算一维周期信号的周期/频率
- 可以应用在一维周期信号的特征提取
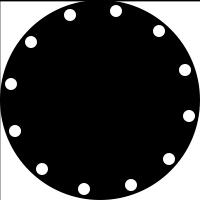
- 给出一幅图像,我们求出图像中圆形的周期和相位
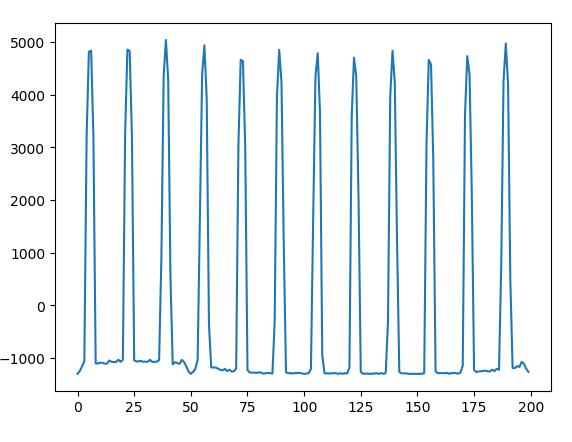
计算一维周期信号的周期/频率
- 去均值一维信号
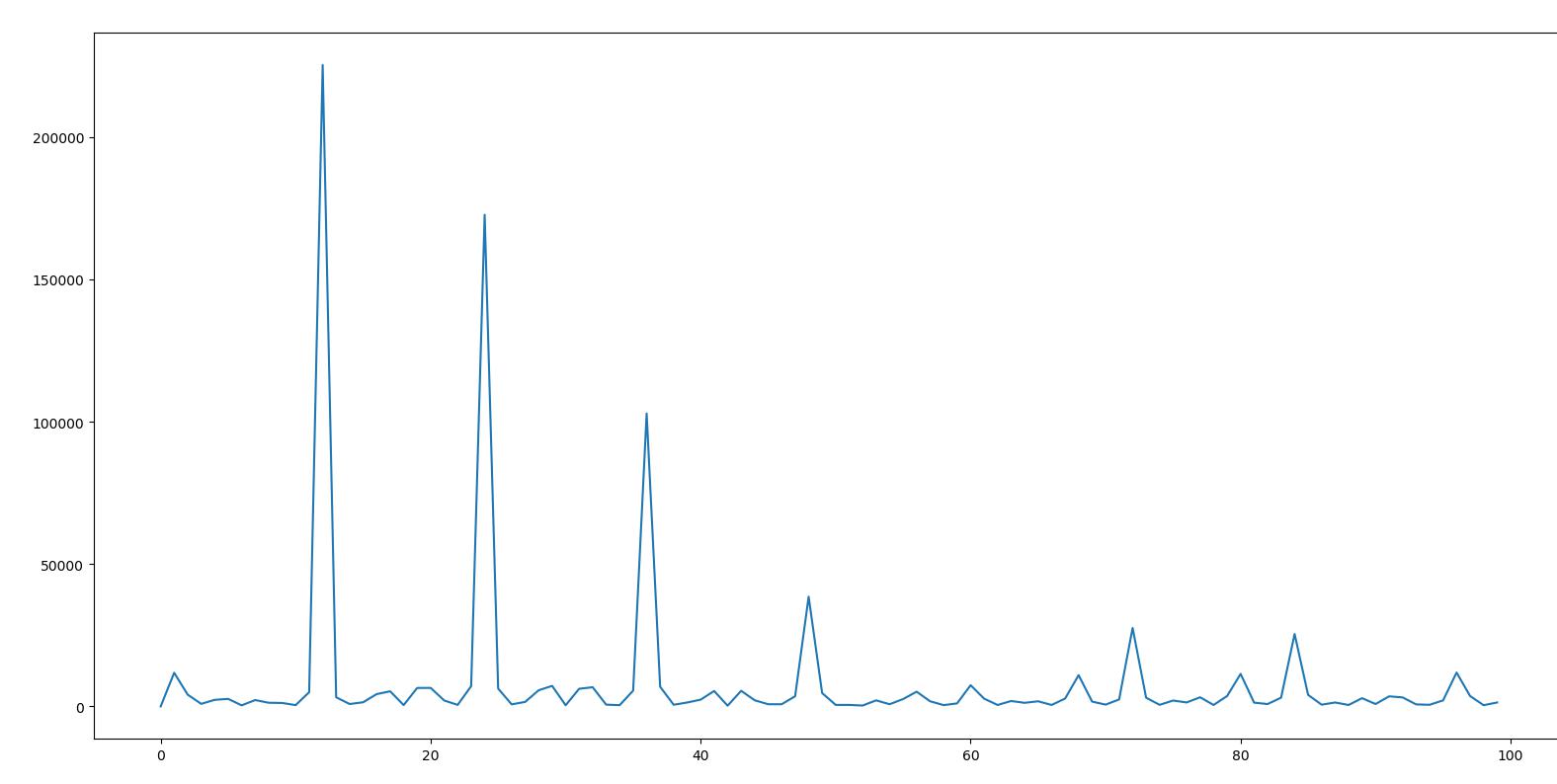
计算一维周期信号的周期/频率
- 离散傅里叶变换,计算模长
- 其中能量最大的就是信号的频率 12,与实际相符
- 通过计算频域复数在 12 这一点的角度,可以得到周期信号的起始相位
计算图像旋转角度
Halcon 实例: determine grid rotation fft

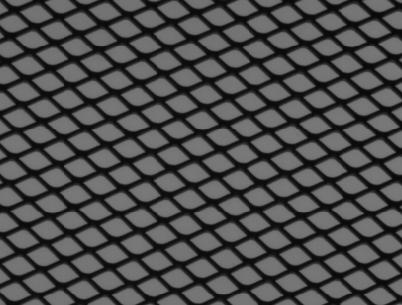
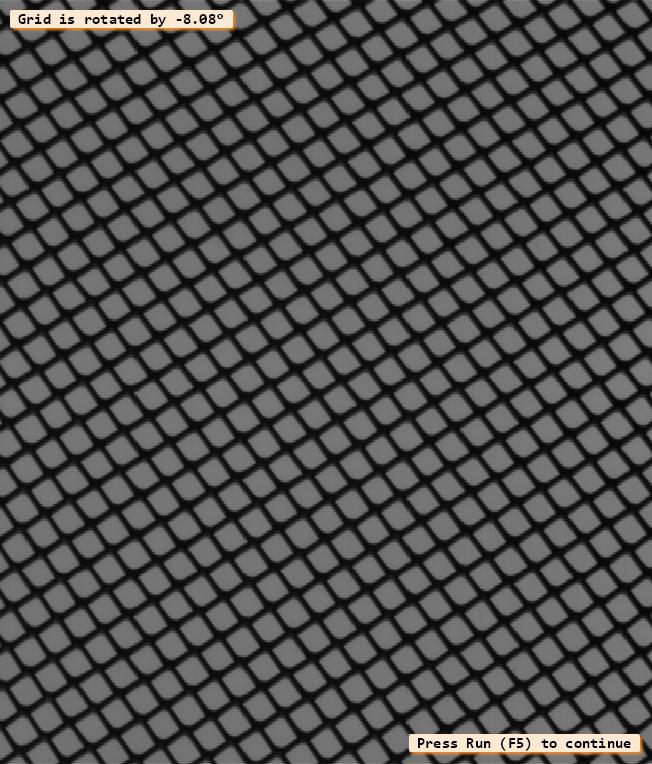
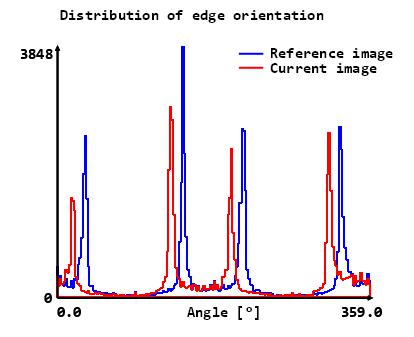
计算图像旋转角度
统计二者的梯度方向累计直方图,可以发现由于旋转产生的位移偏差
这样我们得到了两个循环移位的一维信号
此时可以用傅里叶变换求得互相关结果,选择相关性最高的点作为角度变换结果
也可以利用相位相关,求得信号位移在时域上的冲击相应位置,求得旋转角度
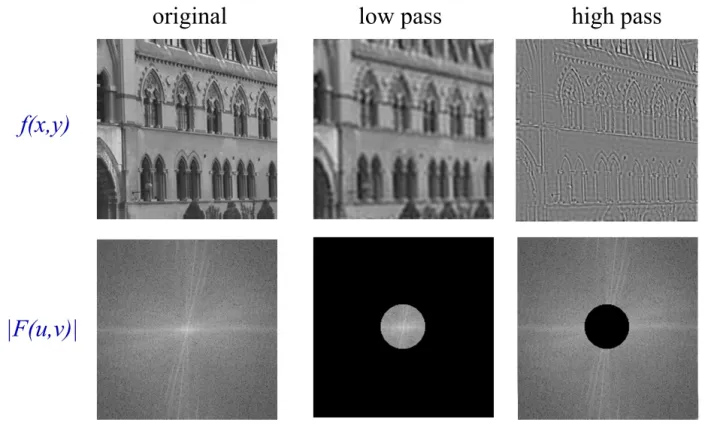
图像压缩
- 自然图像往往有邻域强相关的特性,因此低频分量承载了更多的图像信息
- 可以运用此性质在保存图像数据时适当丢弃部分高频数据,以实现图像压缩(JPEG)
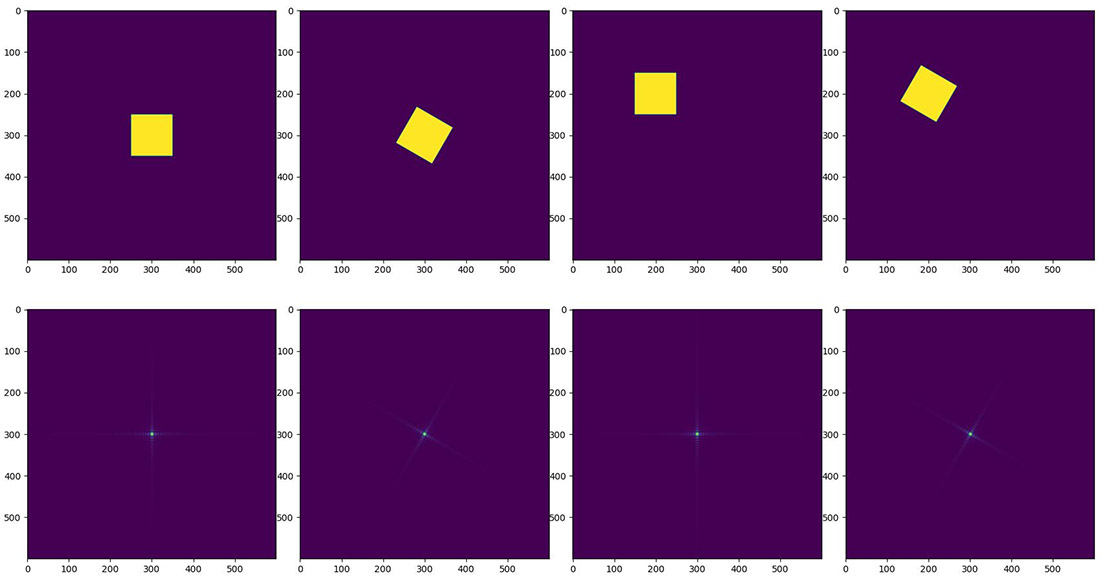
旋转和平移
- 如果旋转时域图像,由于旋转没有改变平面波的幅度相位,只是将所有的平面波都旋转了一个角度,那么频域图像也会旋转相应的角度。
- 平移时域图像,相当于周期信号没有变,仅是相位发生了变化,因此在频域中的表示是相位变化,而能量谱不变。
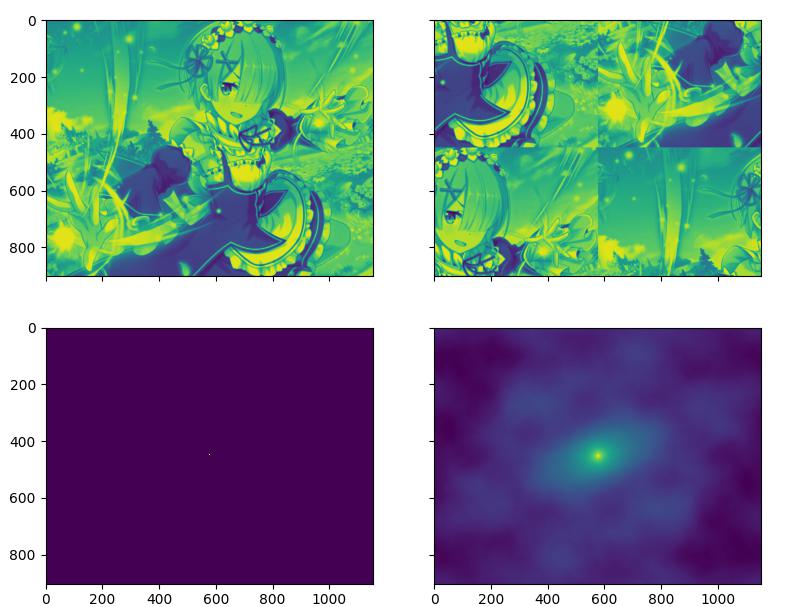
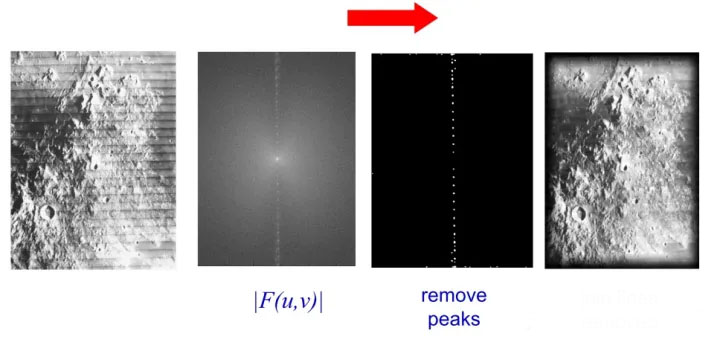
去掉周期性噪声
- 对于周期的背景信号,在频域空间中就会产生规律的亮点,如果将这些亮点去掉则可以起到去噪的效果

相位相关计算平移参数
- 该应用常用于平移图像的平移距离搜索,通过相位相关可以计算得到平移距离:

互相关和相位相关
- 相位相关和互相关均可以用于平移搜索
- 二者的结果一个是冲击信号,一个是相关度计算的结果,在实际应用中相位相关在处理位移搜索时表现更加鲁棒。
- 但是相位相关的问题是最大值的含义并不明确,讲道理最大值应该是 1(理想情况),但实际应用时忽大忽小,不如互相关能给出分值可解释(相关系数)
- 因此可以采用使用相位相关计算出平移参数,定位后计算两幅图像的相关度,结合鲁棒性和可解释性给出结果。